ufactory_vision
Project Overview
ufactory_vision is a vision-based grasping demo project based on UFACTORY robot arms. Users can quickly implement vision-based object detection and grasping with this project.
Hardware Requirements
Hardware Configuration for Example Scripts
| Robot Arm Model | Camera Model | End Effector |
|---|---|---|
| xArm 5/6/7 or 850 | Intel Realsense D435/D555, Luxonis OAK-D-Pro-PoE | UFACTORY GripperG1/G2 |
| Lite 6 | Intel Realsense D435 / Luxonis OAK-D-Pro-PoE | Vacuum Gripper Lite |
- Configuration with Intel Realsense D435 Camera: Readme
- Configuration with Intel Realsense D555 Camera: Readme
- Configuration with Luxonis OAK-D-Pro-PoE Camera: Readme
Videos
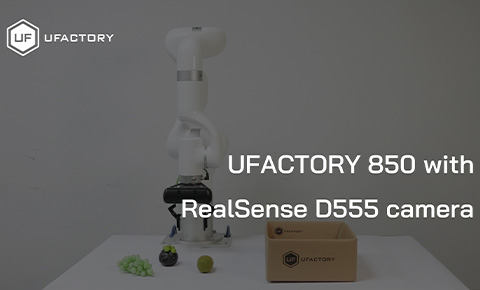
Customized 850 + Realsense D555 + UFACTORY Gripper G2
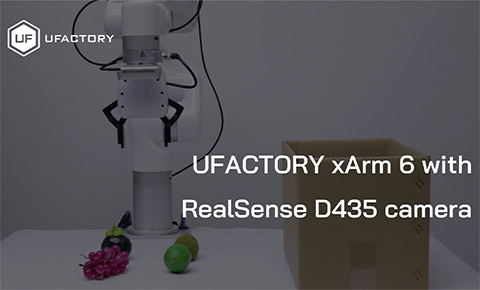
xArm6 + Realsense D435 + UFACTORY Gripper G1
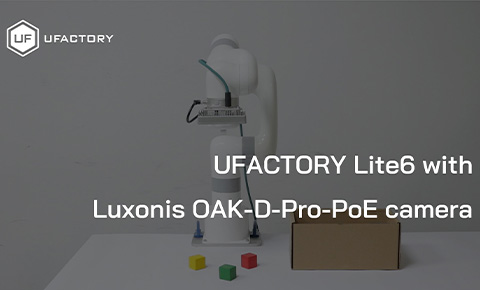
Lite6 + Luxonis OAK-D-Pro-PoE + Vacuum Gripper Lite
Important Notes
- TCP/Coordinate Offset: Do not set TCP offset or coordinate offset, otherwise you may need to fine-tune the code.
- TCP Payload: Set TCP payload to avoid false collision detection.
- Collision Detection: Before running the example, ensure that collision detection is enabled. It is recommended to set the collision sensitivity to 3 or higher.
License
This project is licensed under the BSD 3-Clause License. For details, please check the LICENSEfile.
Acknowledgements
Our demo project is built based on the following open-source projects: