UFactory 850
Kinematic and Dynamic Parameters of UFACTORY 850
1. Modified D-H Parameters
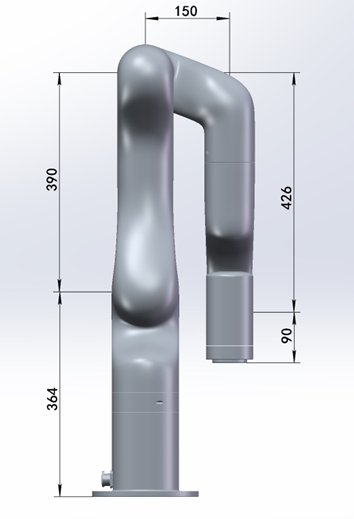
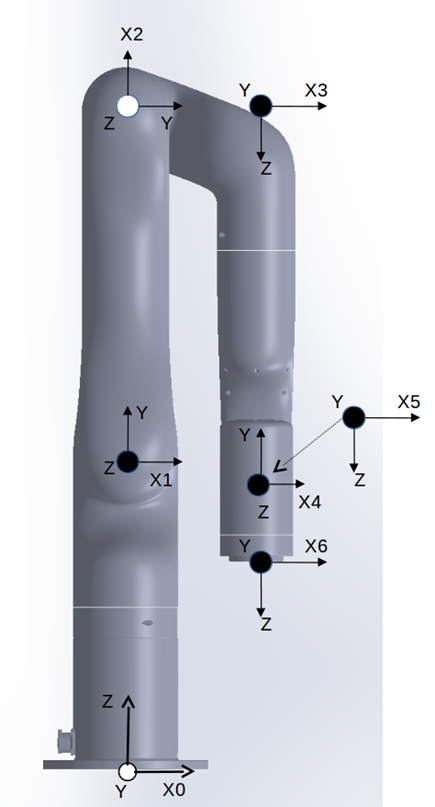
| Size Parameters: (unit:mm) | Joint Coordinate Definition |
|---|---|
 |  |
| Kinematics | theta offset(deg) | d(mm) | alpha(deg) | a(mm) |
|---|---|---|---|---|
| Joint1 | 0 | 364 | 0 | 0 |
| Joint2 | 90 | 0 | 90 | 0 |
| Joint3 | 90 | 0 | 180 | 390 |
| Joint4 | 0 | 426 | -90 | 150 |
| Joint5 | 0 | 0 | -90 | 0 |
| Joint6 | 0 | 90 | 90 | 0 |
2. Standard D-H Parameters
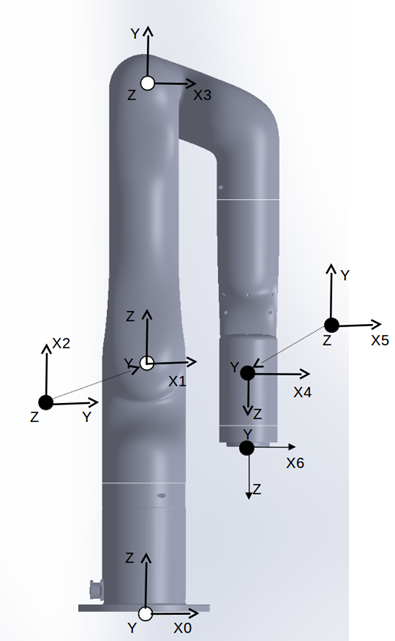
| Size Parameters: (unit:mm) | Joint Coordinate Definition |
|---|---|
|  |
| Kinematics | theta offset(deg) | d(mm) | alpha(deg) | a(mm) |
|---|---|---|---|---|
| Joint1 | 0 | 364 | 90 | 0 |
| Joint2 | 90 | 0 | 180 | 390 |
| Joint3 | 90 | 0 | -90 | 150 |
| Joint4 | 0 | 426 | -90 | 0 |
| Joint5 | 0 | 0 | 90 | 0 |
| Joint6 | 0 | 90 | 0 | 0 |
3. Mass Parameters
| Size Parameters: (unit:mm) | Joint Coordinate Definition |
|---|---|
|  |
| Dynamics | Mass(kg) | Center of Mass[x,y,z]-Modified DH Coordinate System |
|---|---|---|
| Link1 | 4.811 | [-0.049, 13.92, -20.31] |
| Link2 | 3.166 | [327.98, 0.074, 6.48] |
| Link3 | 2.247 | [130.23, 105.18, 8.97] |
| Link4 | 2.12 | [0.016, -38.47, -98.3] |
| Link5 | 1.346 | [-0.42, -17.6, -1.42] |
| Link6 | 0.225 | [0.15, 1.38, -13.97] |