How to reset the zero position of xArm Gripper?
Product: xArm Gripper.
- Press down the E stop button.
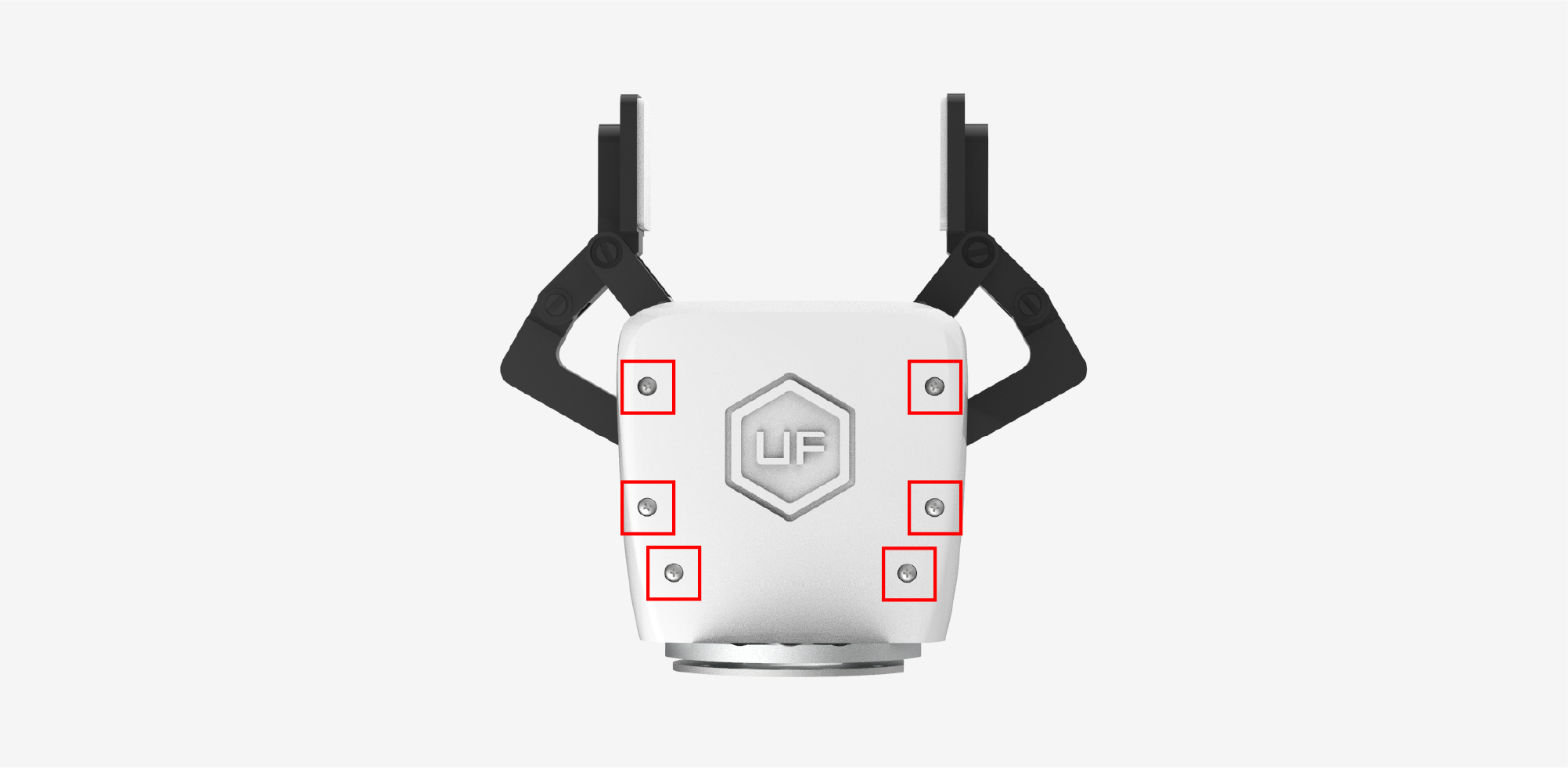
- Remove 6 screws on the gripper cover and manually turn the motor of the gripper, to close the gripper.
- Release the E stop button and Enable the robot.
- Copy the Python code below to UFactoryStudio or local Python IDE.
- Modify to the corresponding IP.
- Run the script, it will set the current position of the gripper as 0. Press down the E stop button and release to take effect.
- Try to control the gripper.
NOTE
Applicable only to the xArm Gripper; not compatible with the xArm Gripper G2.
python
import os
import sys
import time
sys.path.append(os.path.join(os.path.dirname(__file__), '../../..'))
from xarm.wrapper import XArmAPI
arm = XArmAPI('192.168.1.202')
time.sleep(0.5)
if arm.warn_code != 0:
arm.clean_warn()
if arm.error_code != 0:
arm.clean_error()
def bytes_to_u16(data):
"""big-endian byte sequence"""
data_u16 = data[0] << 8 | data[1]
return data_u16
def u16_to_bytes(data):
"""big-endian byte sequence"""
bts = bytes([data // 256 % 256])
bts += bytes([data % 256])
return bts
print(arm.get_gripper_version())
ret = arm.core.gripper_modbus_r16s(0x0105, 1)
# print(ret)
print("gripper io ctrl mode:%d"%bytes_to_u16(ret[5:7]))
ret=arm.core.gripper_modbus_w16s(0x1105,u16_to_bytes(1),1)
print(ret)
ret = arm.core.gripper_modbus_r16s(0x0105, 1)
# print(ret)
print("gripper io ctrl mode:%d"%bytes_to_u16(ret[5:7]))
ret=arm.core.gripper_modbus_w16s(0x1817,u16_to_bytes(1),1)
print(ret)