Guide to run robotic arm at the maximum speed?
Take xArm Series as an example.
Firmware version: v2.0.0+
UFactory Studio version: v2.0.0+
xArm-Python-SDK version: v1.10.0+
1. Parameter Adjustment
The main parameters that affect the movement speed of xArm are: speed, acceleration, and jerk.
| TCP Motion | Joint Motion | |
|---|---|---|
| Speed | 1000mm/s | 0 ~ 180°/s |
| Acceleration | 50000mm/s² | 1146°/s² |
| Jerk | 100000mm/s³ | 28647°/s³ |
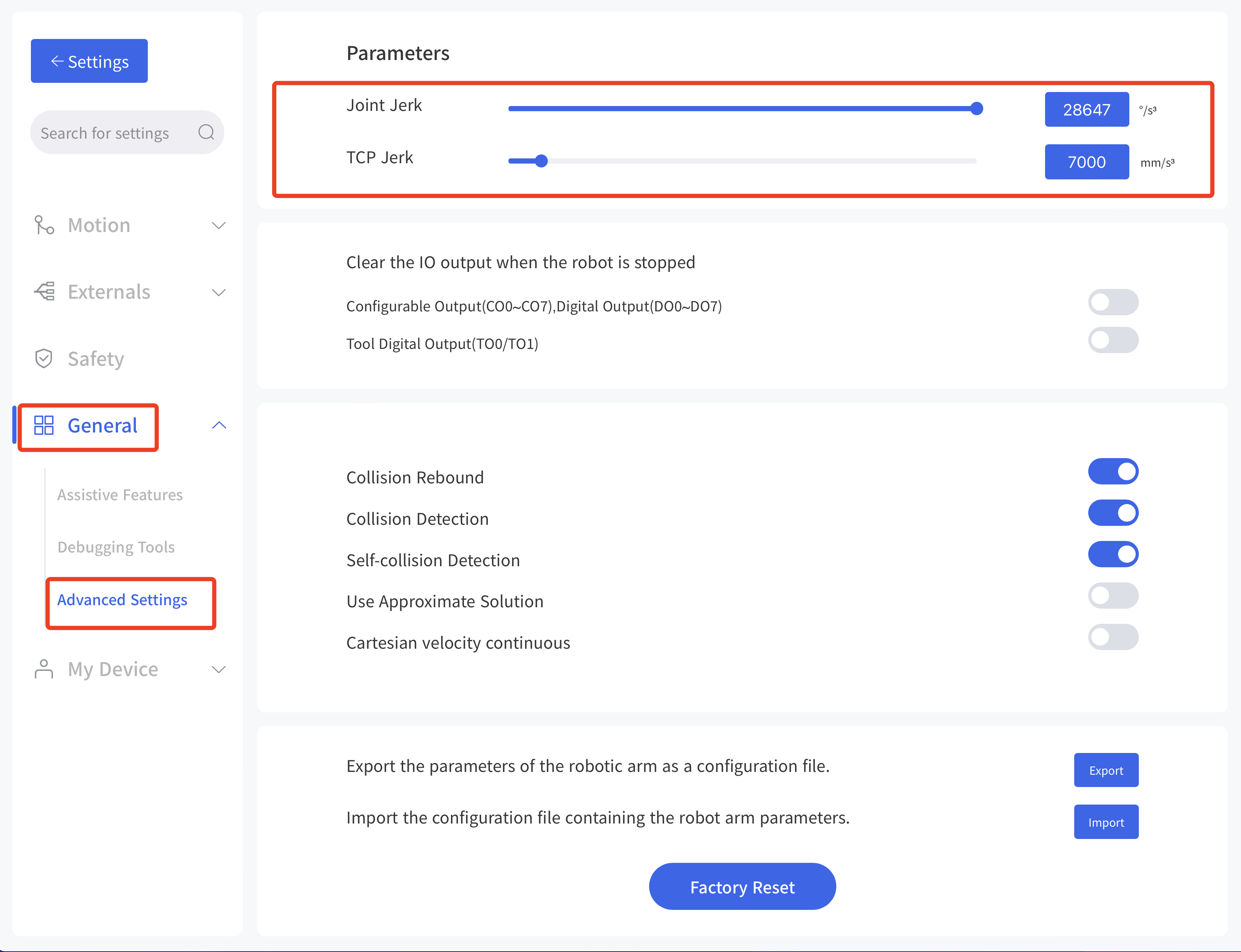
It is recommended to adjust the jerk to the maximum, which will speed up the motion of robotic arm.
- Parameter adjustment via UFACTORY Studio
'Settings-General-Advanced Settings-Parameters'
- Parameter adjustment via Python SDK
1) Speed: 'speed' parameter
2) Acceleration: 'mvacc' parameter
3) Jerk: set_tcp_jerk() , set_joint_jerk()
//code example
arm.set_tcp_jerk(100000)
arm.set_joint_jerk(28647, is_radian=True)
arm.save_conf()2. Motion Planning
Adjust Parameters to do continuous motion.
- radius > 0
- wait = False
Example:
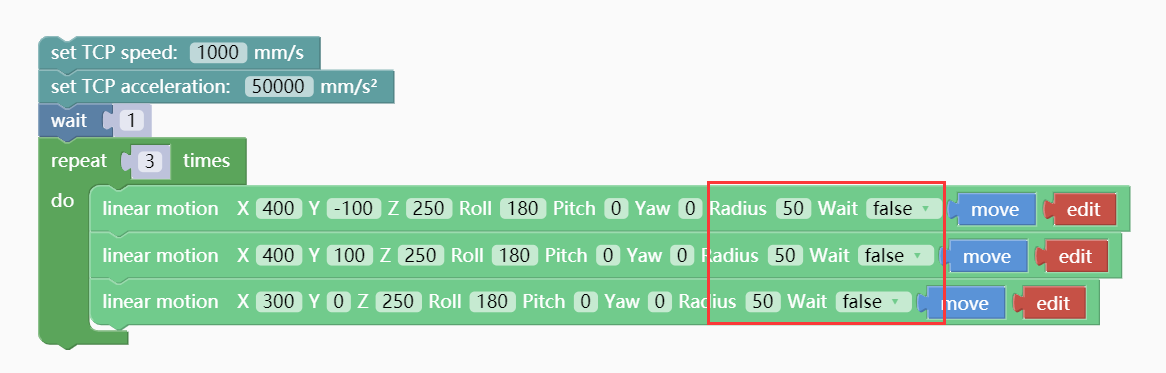
Radius>0, wait=False; Video: https://youtu.be/oX_J8RplEw4
Radius>0, wait=True; Video:https://youtu.be/wpBzt3a30L0
Radius<0, wait=False; Video:https://youtu.be/pi-5PPhPpfg