Lite6
Kinematic and Dynamic Parameters of UFACTORY Lite 6
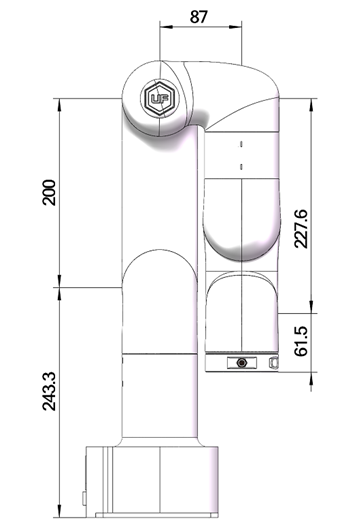
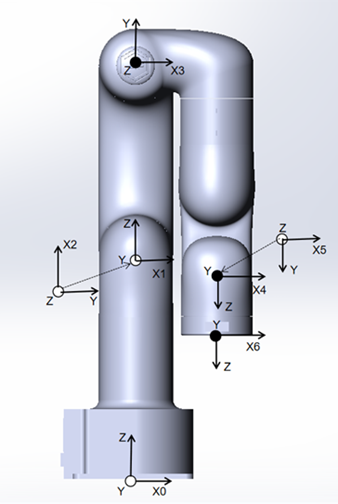
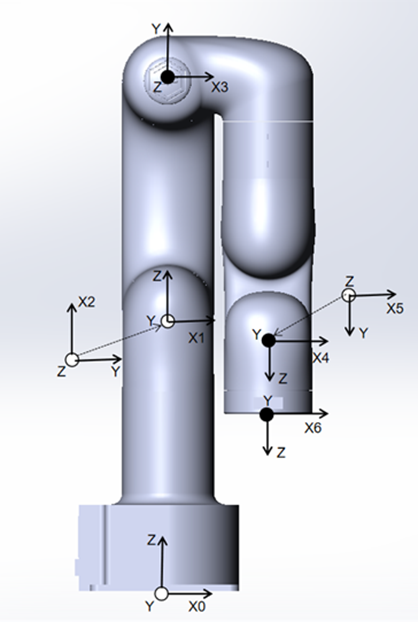
1. Modified D-H Parameters
| Size Parameters: (unit:mm) | Joint Coordinate Definition |
|---|---|
 |  |
| Kinematics | theta offset(deg) | d(mm) | alpha(deg) | a(mm) |
|---|---|---|---|---|
| Joint1 | 0 | 243.3 | 0 | 0 |
| Joint2 | -90 | 0 | -90 | 0 |
| Joint3 | -90 | 0 | 180 | 200 |
| Joint4 | 0 | 227.6 | 90 | 87 |
| Joint5 | 0 | 0 | 90 | 0 |
| Joint6 | 0 | 61.5 | -90 | 0 |
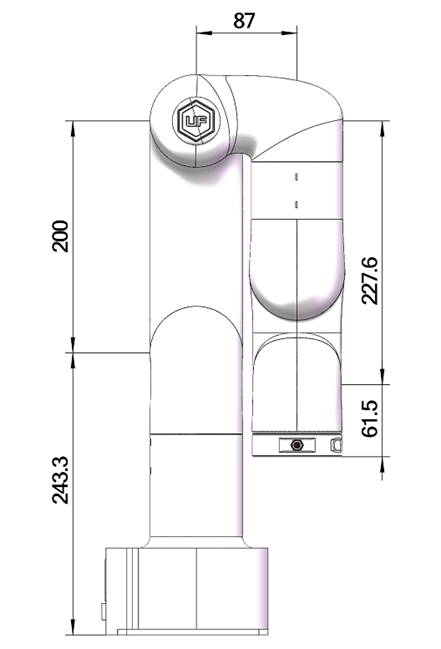
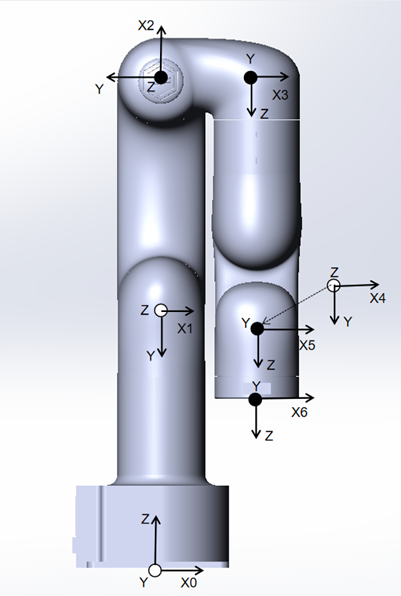
2. Standard D-H Parameters
| Size Parameters: (unit:mm) | Joint Coordinate Definition |
|---|---|
 |  |
| Kinematics | theta offset(deg) | d(mm) | alpha(deg) | a(mm) |
|---|---|---|---|---|
| Joint1 | 0 | 243.3 | -90 | 0 |
| Joint2 | -90 | 0 | 180 | 200 |
| Joint3 | -90 | 0 | 90 | 87 |
| Joint4 | 0 | 227.6 | 90 | 0 |
| Joint5 | 0 | 0 | -90 | 0 |
| Joint6 | 0 | 61.5 | 0 | 0 |
3. Mass Parameters
| Size Parameters: (unit:mm) | Joint Coordinate Definition |
|---|---|
|  |
| Dynamics | Mass(kg) | Center of Mass(mm) |
|---|---|---|
| Link1 | 1.411 | [-0.36, 41.95, -2.5] |
| Link2 | 1.34 | [179.0, 0.0, 58.4] |
| Link3 | 0.953 | [72.0, -35.7, -1.0] |
| Link4 | 1.284 | [-2.0, -28.5, -81.3] |
| Link5 | 0.804 | [0.0, 10.0, 1.9] |
| Link6 | 0.13 | [0.0, -1.94, -10.2] |