如何让机械臂以最大速度运动?
如果你想提高UFactory机械臂运动的速度,请调整下面两个方面
本文以xArm系列为例
适用固件版本:V2.0.0+
适用studio版本:V2.0.0+
适用xArm-Python-SDK版本: V1.10.0+
1.参数调整
影响xArm速度的主要参数有:速度,加速度,加加速度
| TCP 运动 | 关节运动 | |
|---|---|---|
| 速度 | 1000mm/s | 0 ~ 180°/s |
| 加速度 | 50000mm/s² | 1146°/s² |
| 加加速度 | 100000mm/s³ | 28647°/s³ |
建议把加加速度调整到最大,这样可以加快机械臂的运动速度
1)通过UFactory Studio调整参数
进入"设置-通用设置-高级设置-参数" 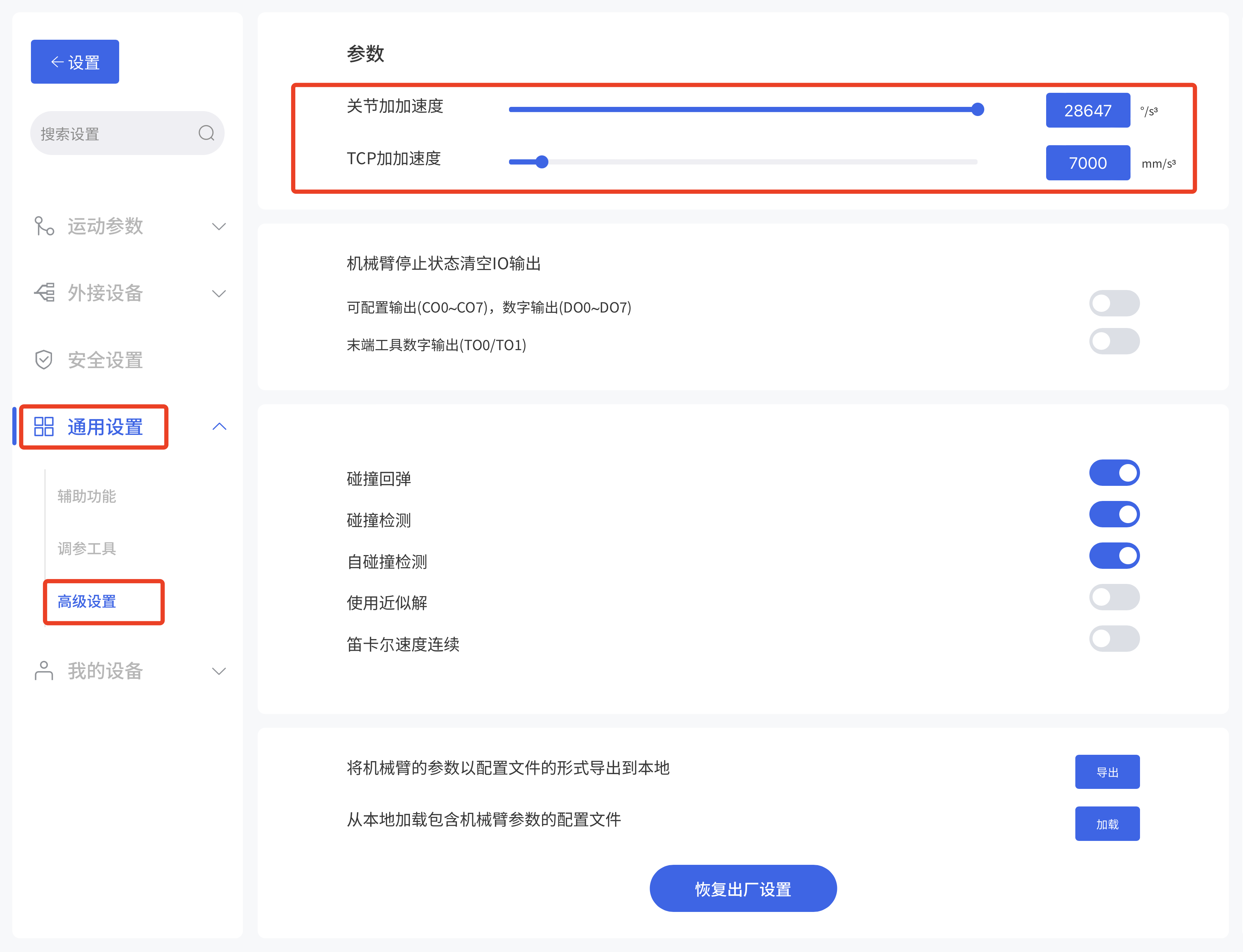
2)通过python SDK调整参数
速度:"speed"参数
加速度:"mavacc"参数
加加速度:set_tcp_jerk() , set_joint_jerk()
python
//code example
arm.set_tcp_jerk(100000)
arm.set_joint_jerk(28647, is_radian=True)
arm.save_conf()2.运动规划
调整参数使手臂做连续运动
- 转弯半径 >0
- 等待 =否
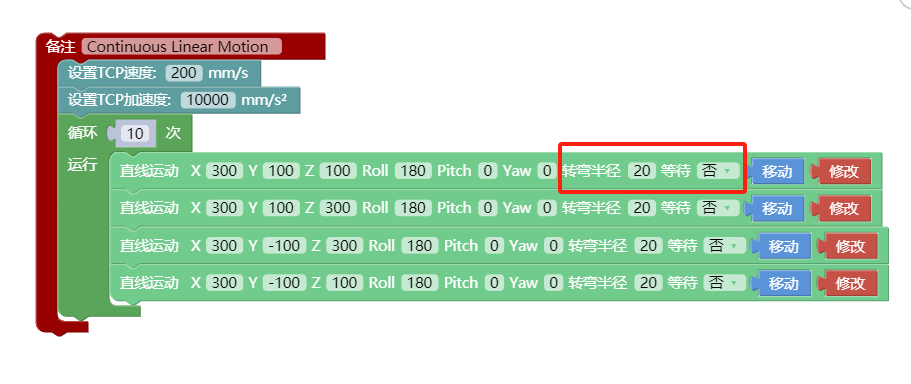
转弯半径 >0, 等待 =否;示例视频:https://www.youtube.com/watch?v=oX_J8RplEw4
转弯半径 >0, 等待 =是;示例视频:https://www.youtube.com/watch?v=wpBzt3a30L0
转弯半径 <0, 等待 =否;示例视频:https://www.youtube.com/watch?v=pi-5PPhPpfg