如何在xArm上使用xArm Gripper和Quick Link快换头
Quick Link安装在xArm机械臂末端,xArm机械爪连接Quick Link快换头,需要注意:
- 线缆连接正确
- 波特率一致
1. 修改xArm机械爪波特率
xArm机械臂默认波特率为2000000, Quick Link快换头默认波特率为115200, 需要确保波特率一致,将xArm机械爪波特率修改为115200。
修改步骤:
- 将xArm机械爪安装在xArm末端,确保可以正常控制,可以在Studio实时控制界面进行一次简单开合。
- 进入设置-外接设备-Modbus RTU,发送修改指令:
08 06 16 01 00 05。 - 拍下控制器上的急停按钮,并松开,波特率修改生效。

(05对应115200,0B对应2000000)
| 波特率对应关系 | |||
|---|---|---|---|
| 0 | 4800bps | 7 | 460800bps |
| 1 | 9600bps | 8 | 921600bps |
| 2 | 19200bps | 9 | 1000000bps |
| 3 | 38400bps | 10 | 1500000bps |
| 4 | 57600bps | 11 | 2000000bps |
| 5 | 115200bps | 12 | 2500000bps |
| 6 | 230400bps |
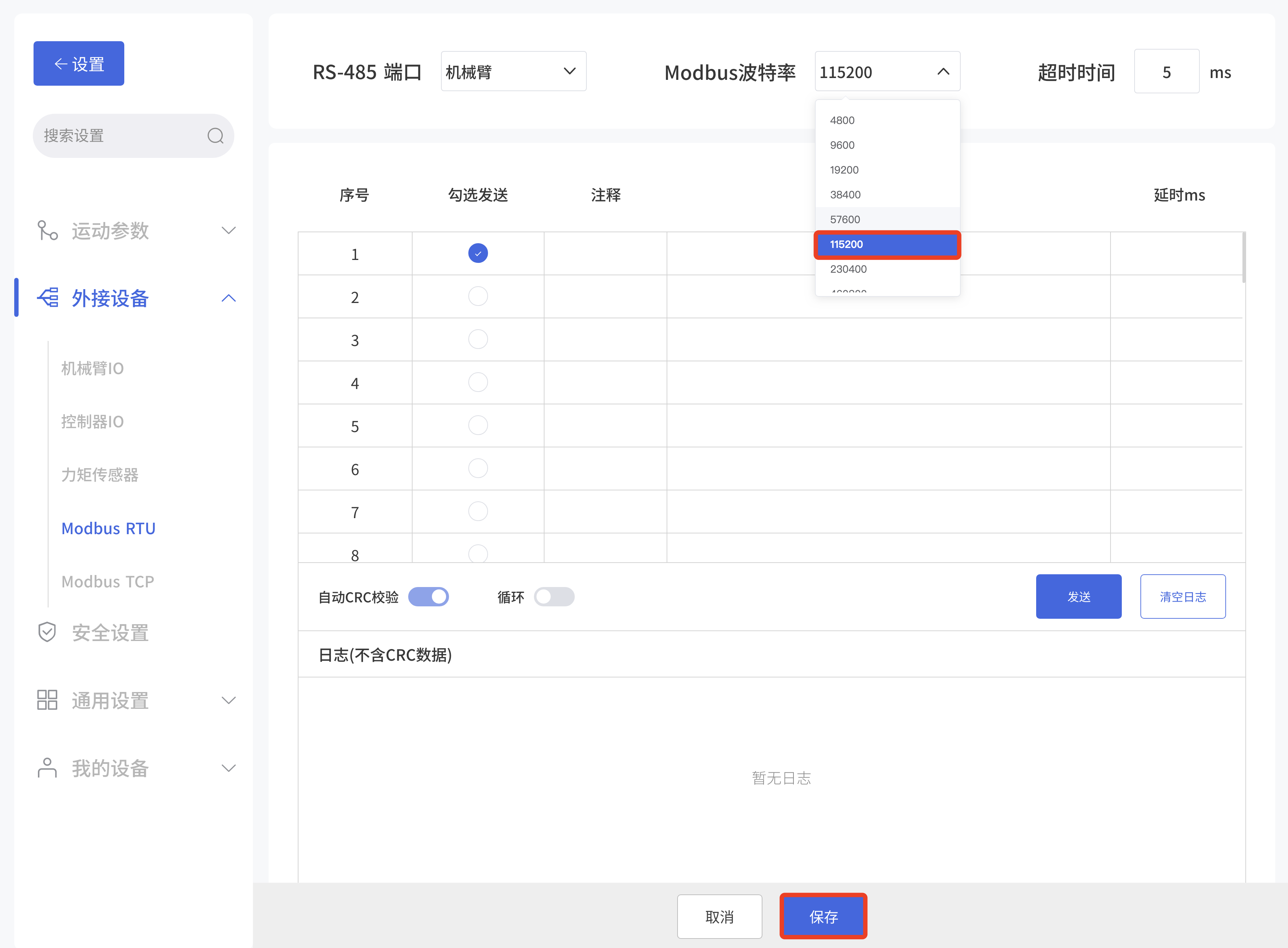
- 验证波特率是否修改成功。进入设置-外接设备-Modbus RTU界面,将机械臂末端波特率修改为115200并保存。进入实时控制界面,验证是否可以正常开合机械爪。
2. 硬件连接
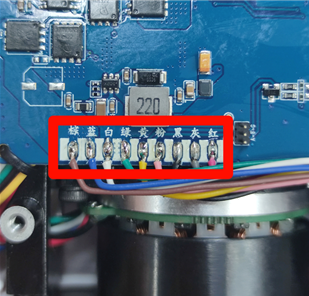
机械爪使用接口定义:
两组24V和GND都要接上。
| 颜色 | 信号 | 颜色 | 信号 |
|---|---|---|---|
| 棕 | +24V(电源) | 白 | GND |
| 蓝 | +24V(电源) | 绿 | GND |
| 粉 | 用户485-A | 黄 | 用户485-B |
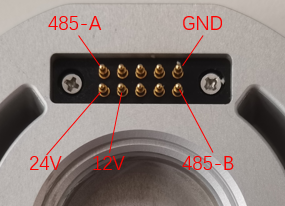
Quick Link快换头定义:
3. 软件控制
- 进入设置-外界设备-Modbus RTU,将波特率设置为115200,超时时间设置为1000ms,点击保存。
- 快换头锁定(这里超时时间需要设置1000ms,快换头回复时间长)
- 快换头供电
- 使能机械爪
- 控制机械爪
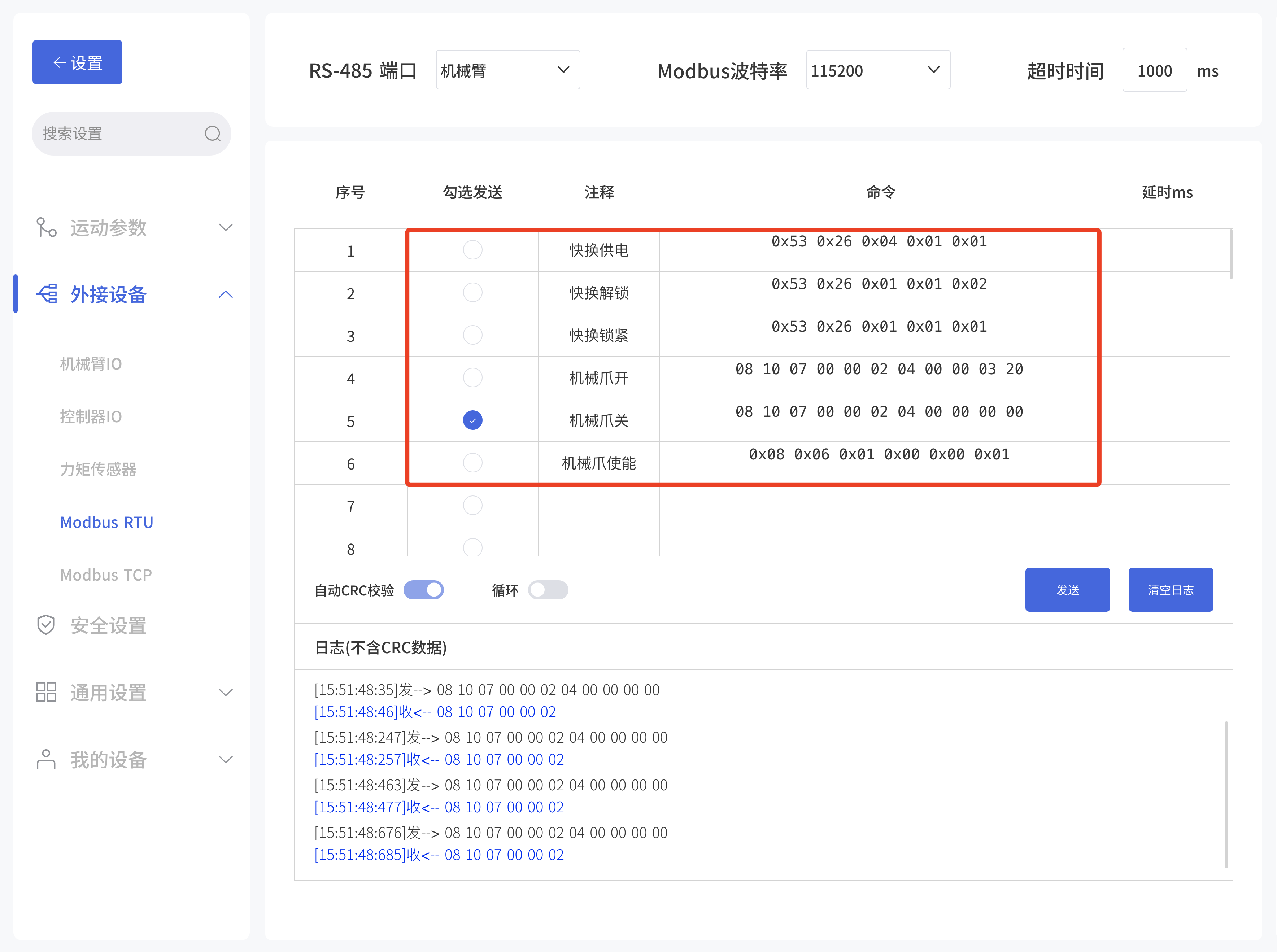
| 操作名称 | 样例指令 | 返回指令 |
|---|---|---|
| 快换-锁紧 | 0x53 0x26 0x01 0x01 0x01 CRC | 53 26 01 01 01 CRC |
| 快换-控制24V/12vadj供电 | 0x53 0x26 0x04 0x01 0x01 CRC | 53 26 04 01 01 2A D5 CRC |
| xArm机械爪-使能 | 0x08 0x06 0x01 0x00 0x00 0x01 CRC | 08 06 01 00 00 01 CRC |
| xArm机械爪-张开到800 | 0x08 0x10 0x07 0x00 0x00 0x02 0x04 0x00 0x00 0x03 0x20 CRC | 08 10 07 00 00 02 CRC |
| xAmr机械爪-闭合到0 | 0x08 0x10 0x07 0x00 0x00 0x02 0x04 0x00 0x00 0x00 0x00 CRC | 08 10 07 00 00 02 CRC |
如何确认硬件连接正确?
拆开机械爪外壳6颗螺丝,用万用表测量Quick Link触点和xArm机械爪PCB的通断。
机械爪: 棕蓝24V+,白绿GND,粉色485A,黄色485B。