850 与 xArm 6 0.1 mm 位移测试
测量方法
- 各型号机械臂由下列初始位置出发,向 X+、Y+、Z+方向以每次0.1 mm 步进指令移动40次,每次移动等待时间为3秒。
- 实际移动距离通过基恩士GT2接触式数字传感器连续测量,采样频率为20HZ。
测试条件
测试在室温进行,机械臂的负载是 0kg
机械臂型号和初始位置
| 产品 | 型号 | 移动方向 | 初始位置 |
|---|---|---|---|
| xArm 6 | XI1305 | X+ | [298, 0, 200, 180, 0, 0] |
| xArm 6 | XI1305 | Y+ | [300, -2, 200, 180, 0, 0] |
| xArm 6 | XI1305 | Z+ | [300, 0, 198, 180, 0, 0] |
| 850 | FX8510 | X+ | [298, 0, 200, 180, 0, 0] |
| 850 | FX8510 | Y+ | [300, -2, 200, 180, 0, 0] |
| 850 | FX8510 | Z+ | [300, 0, 198, 180, 0, 0] |
测试结果
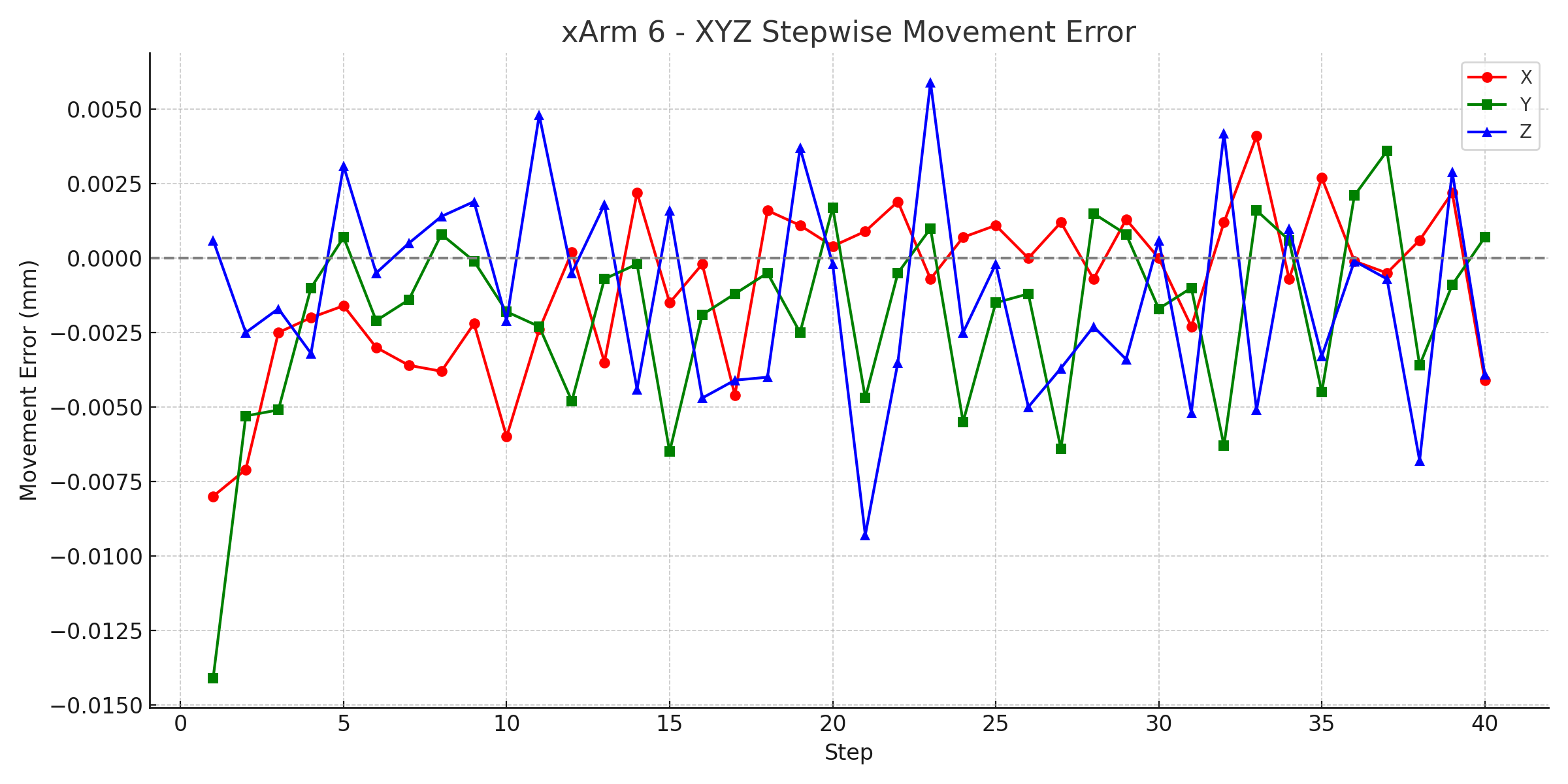
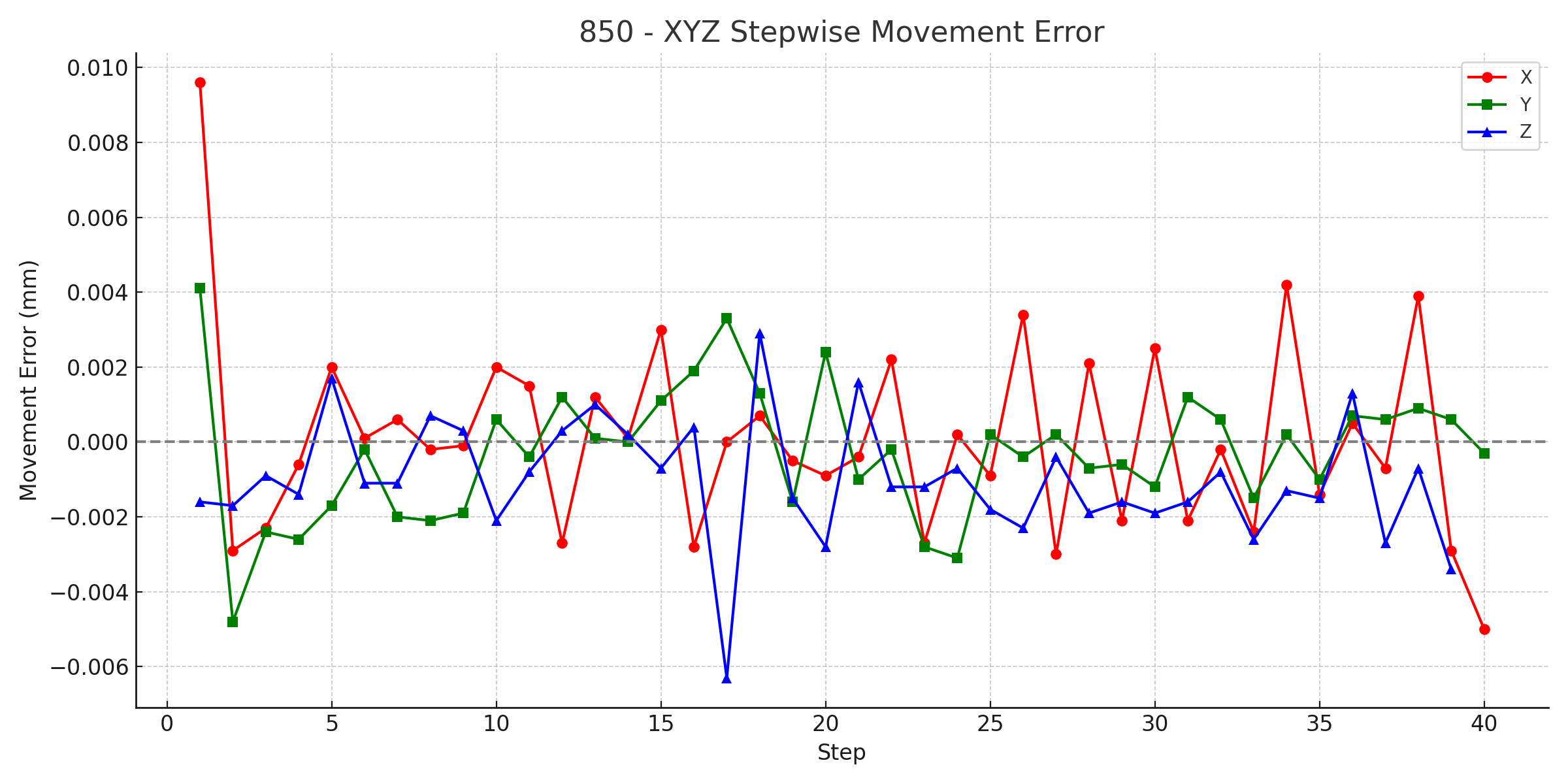
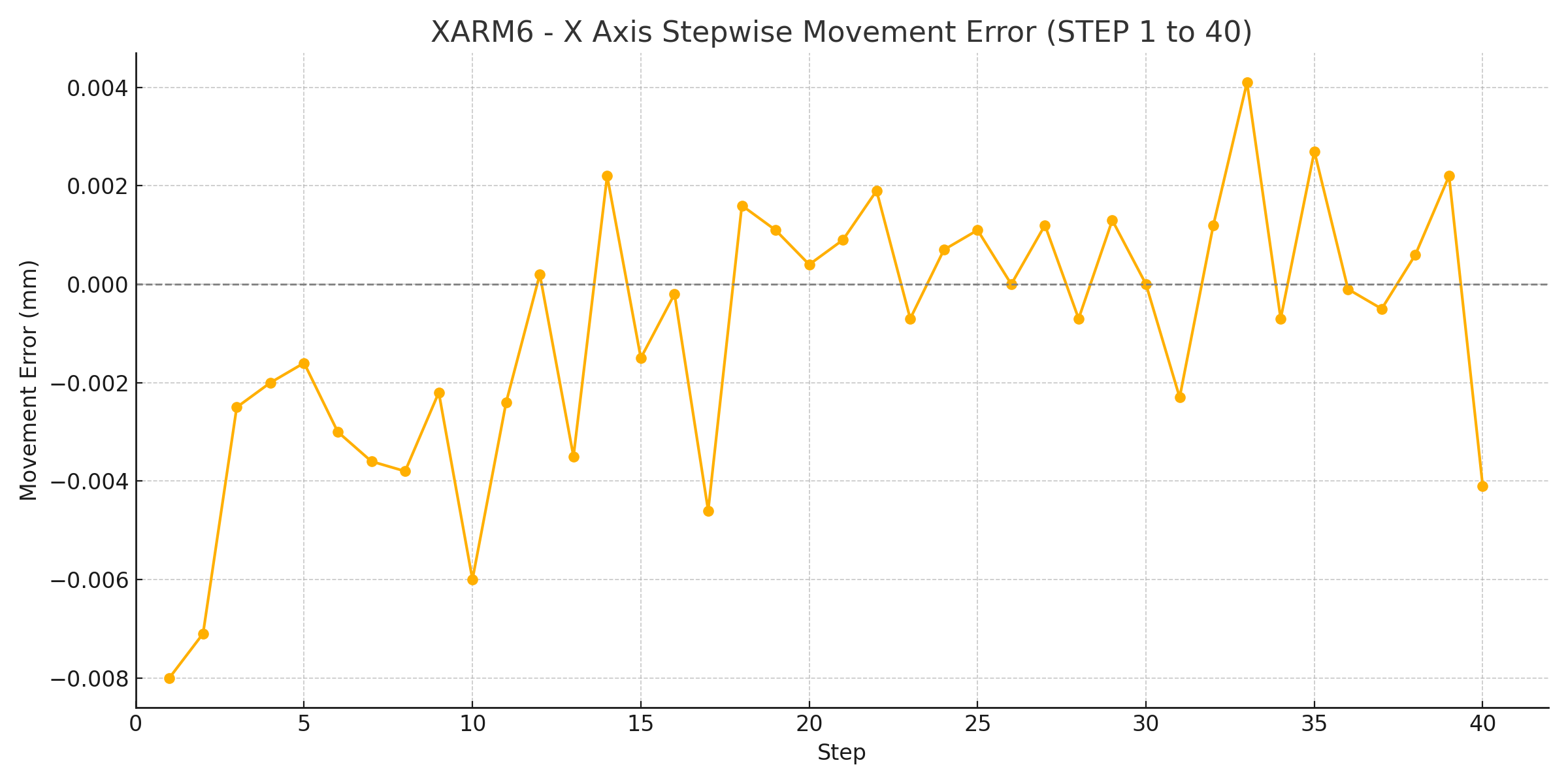
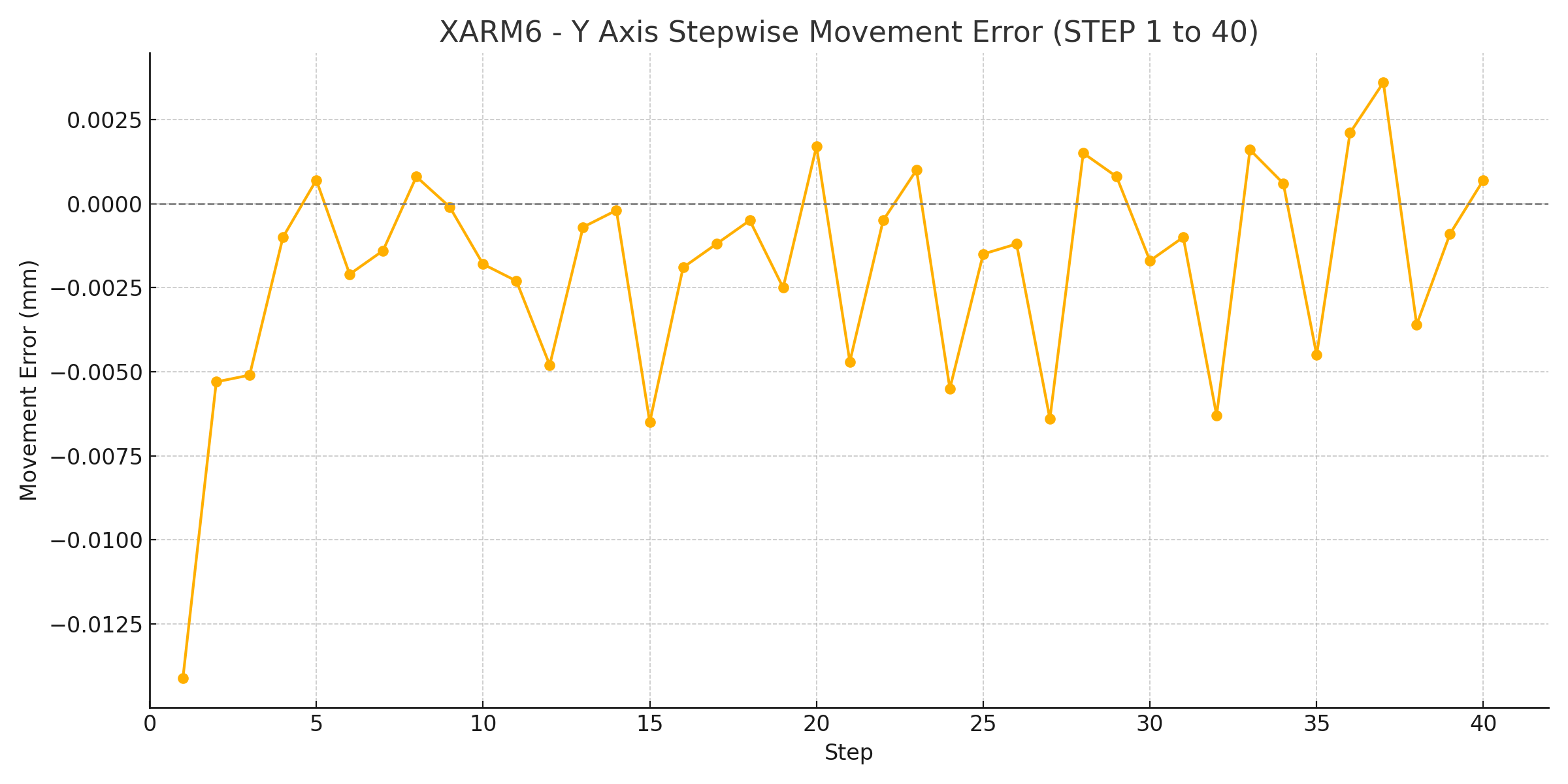
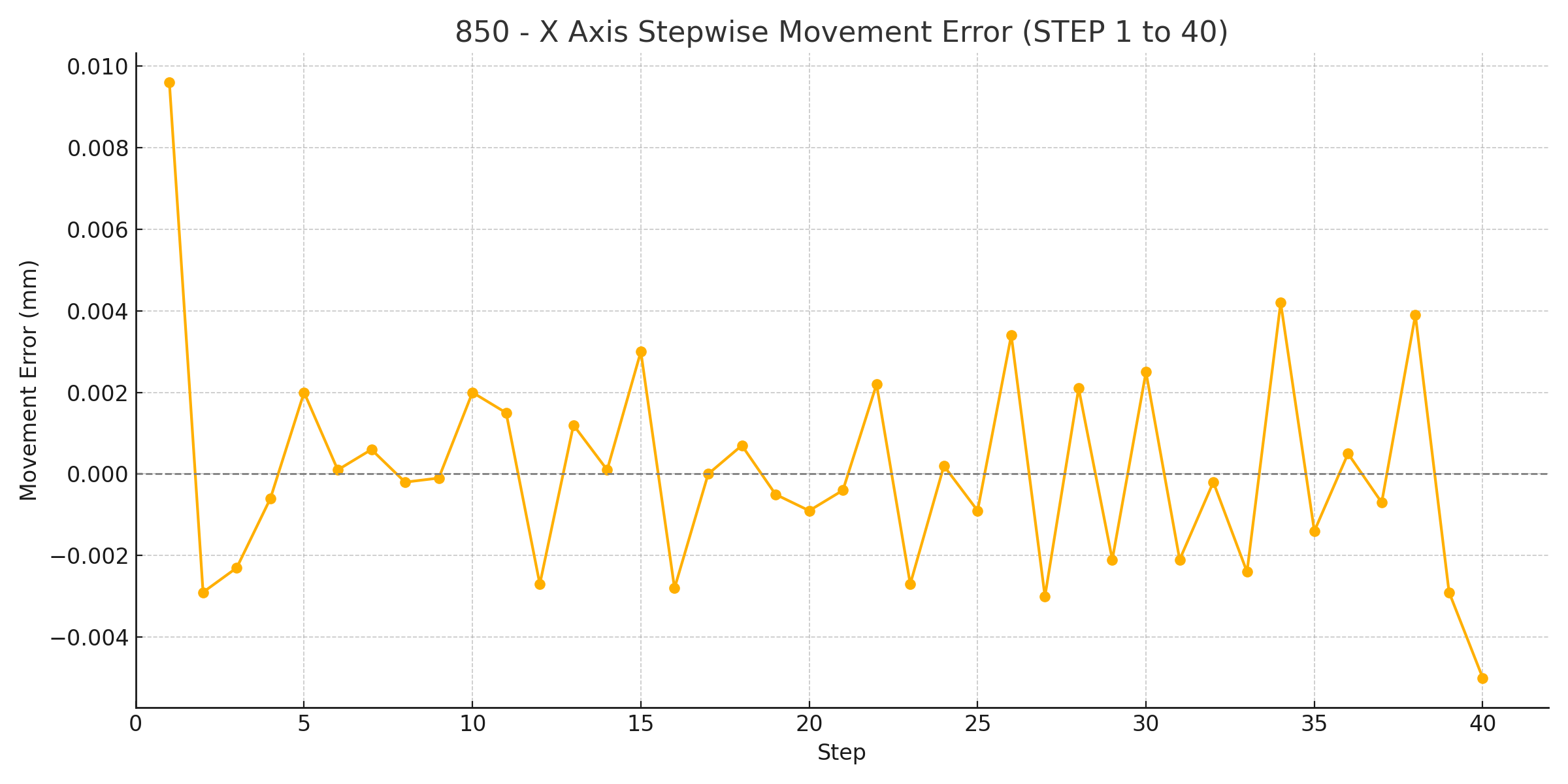
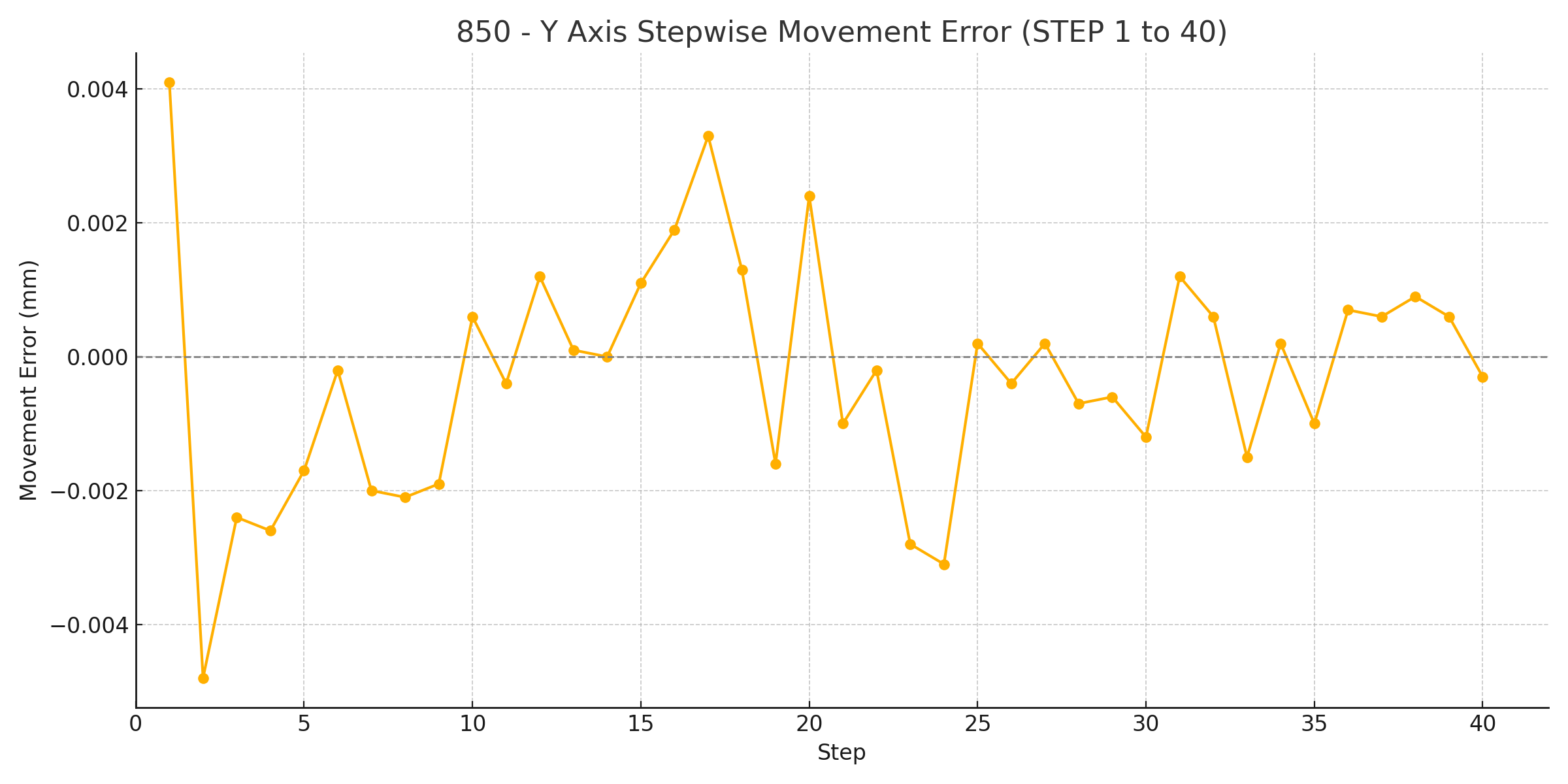
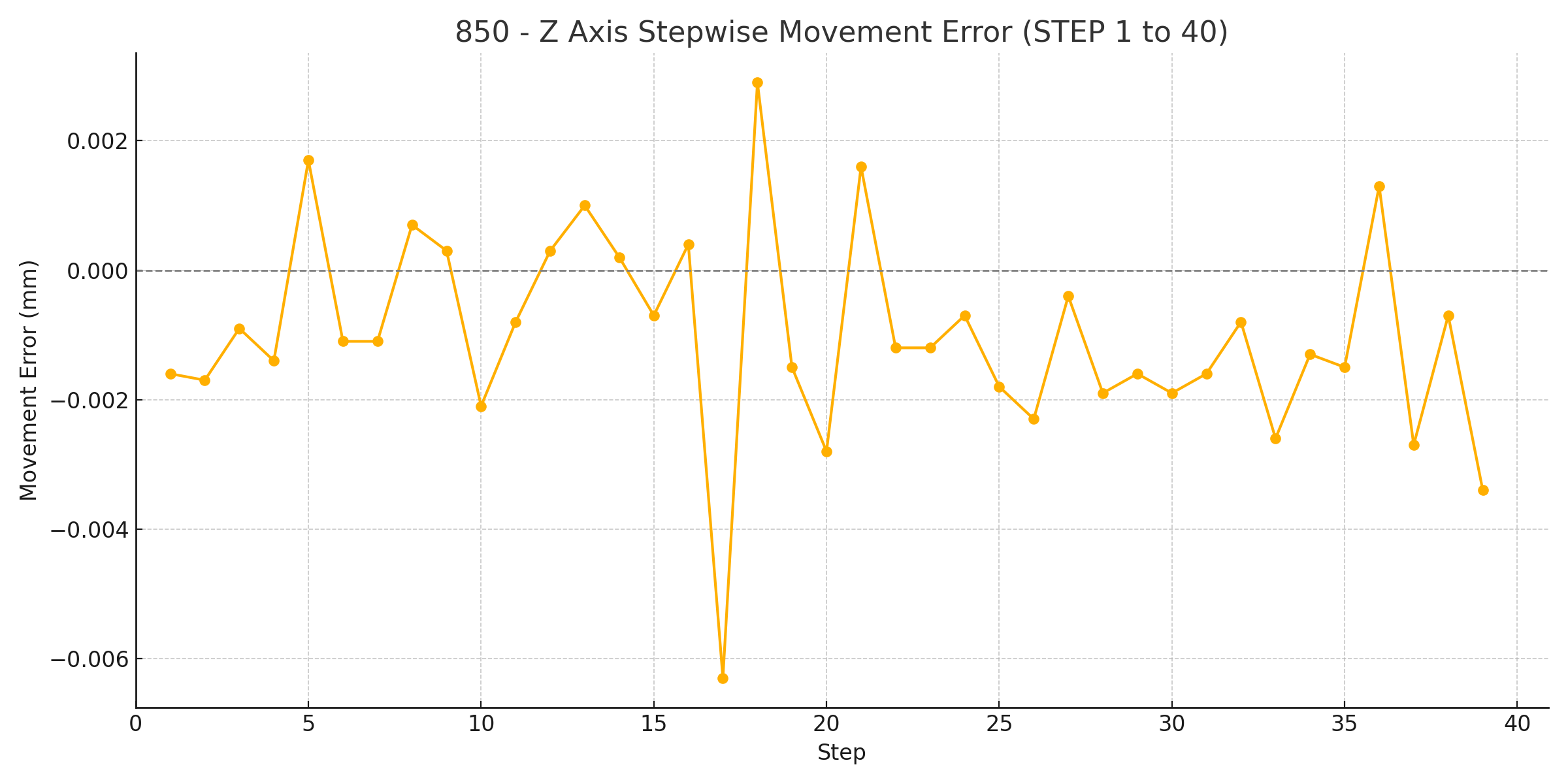
- 每步移动误差图(与理论值 0.1 mm 的差值)
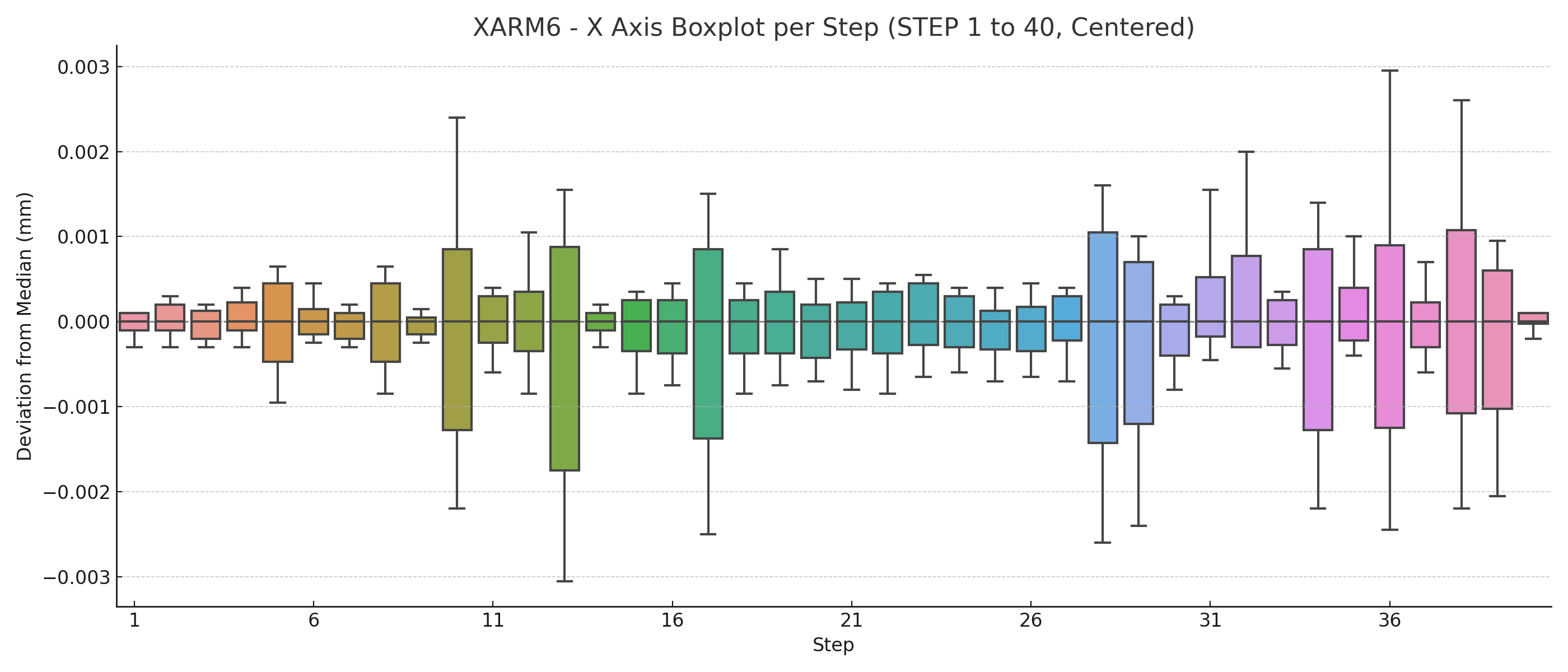
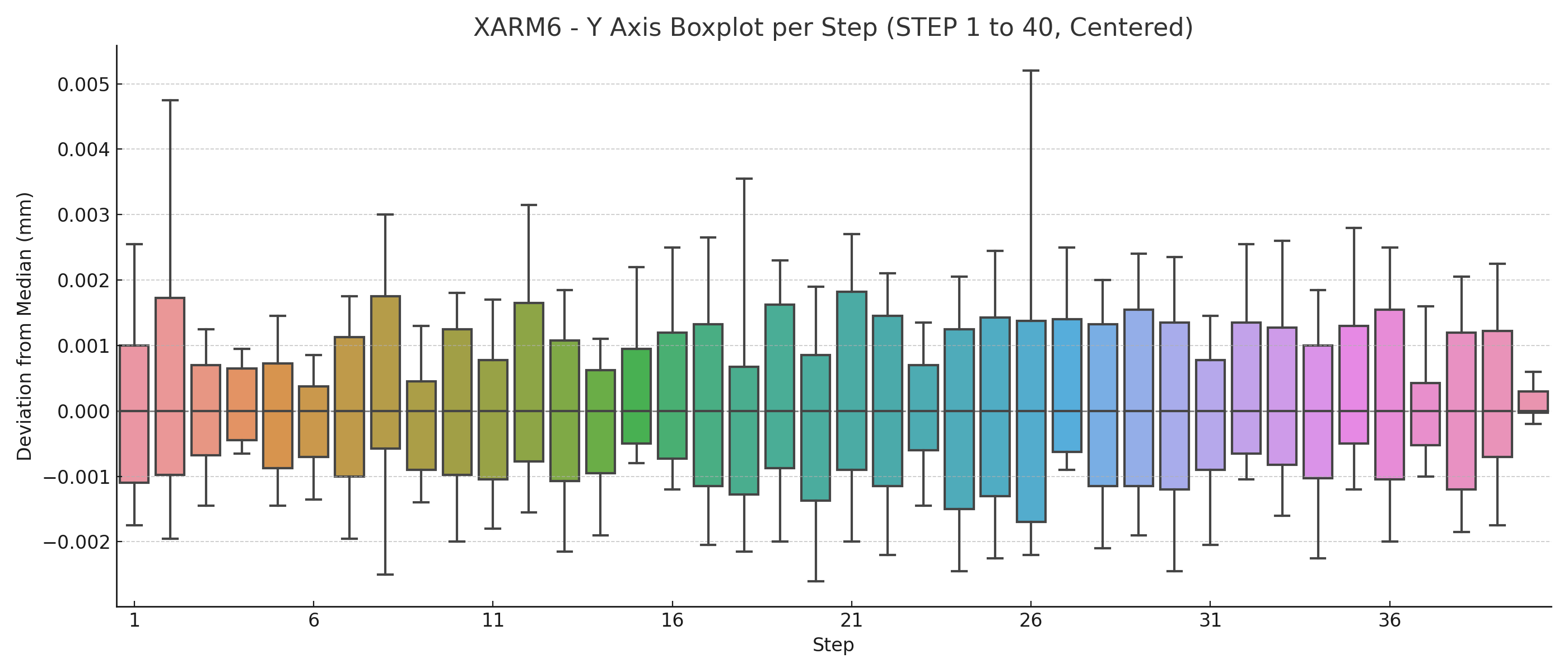
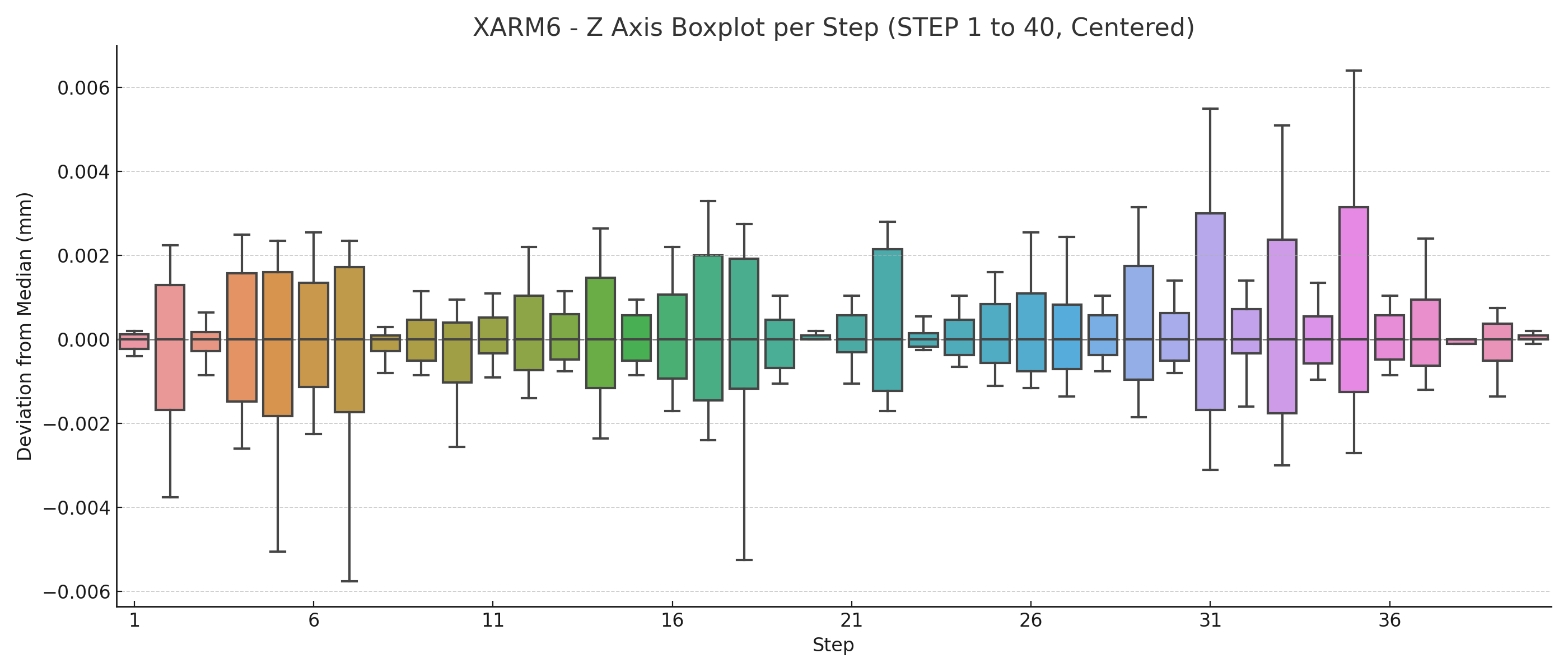
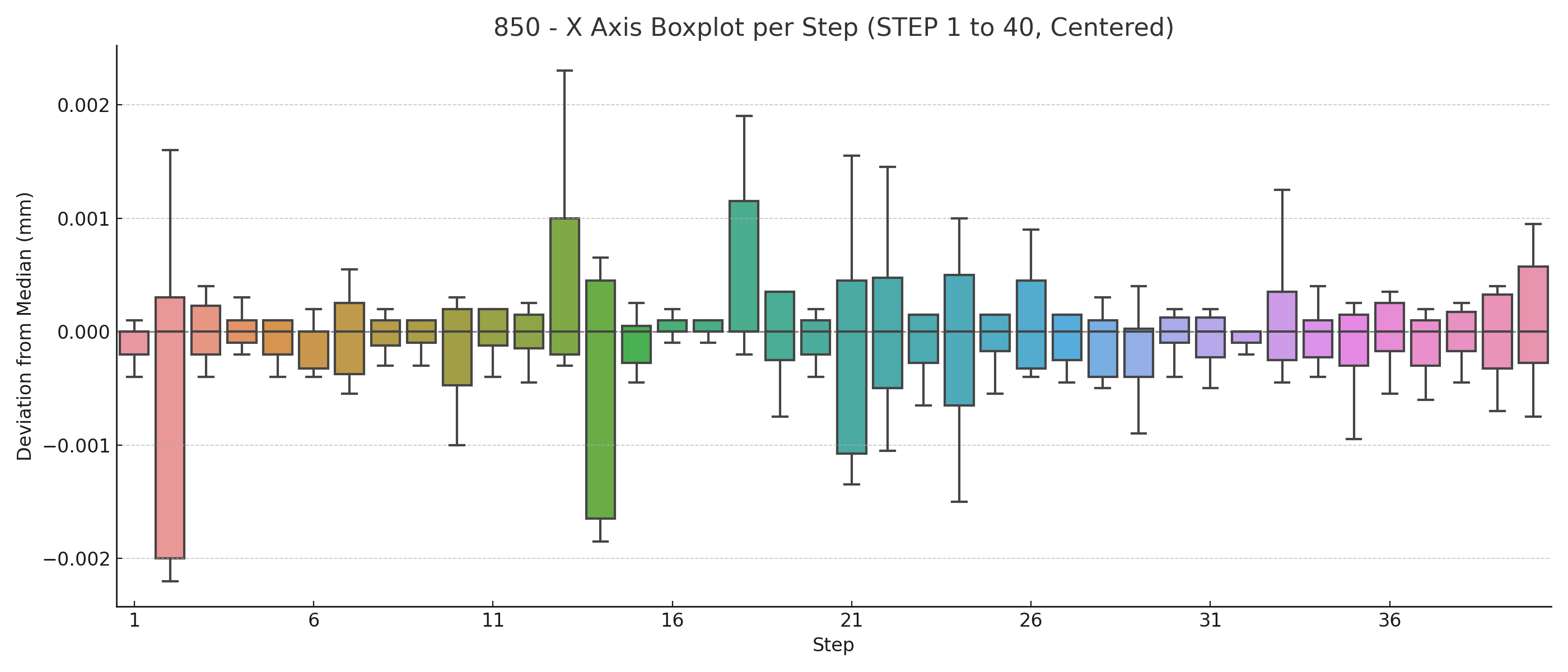
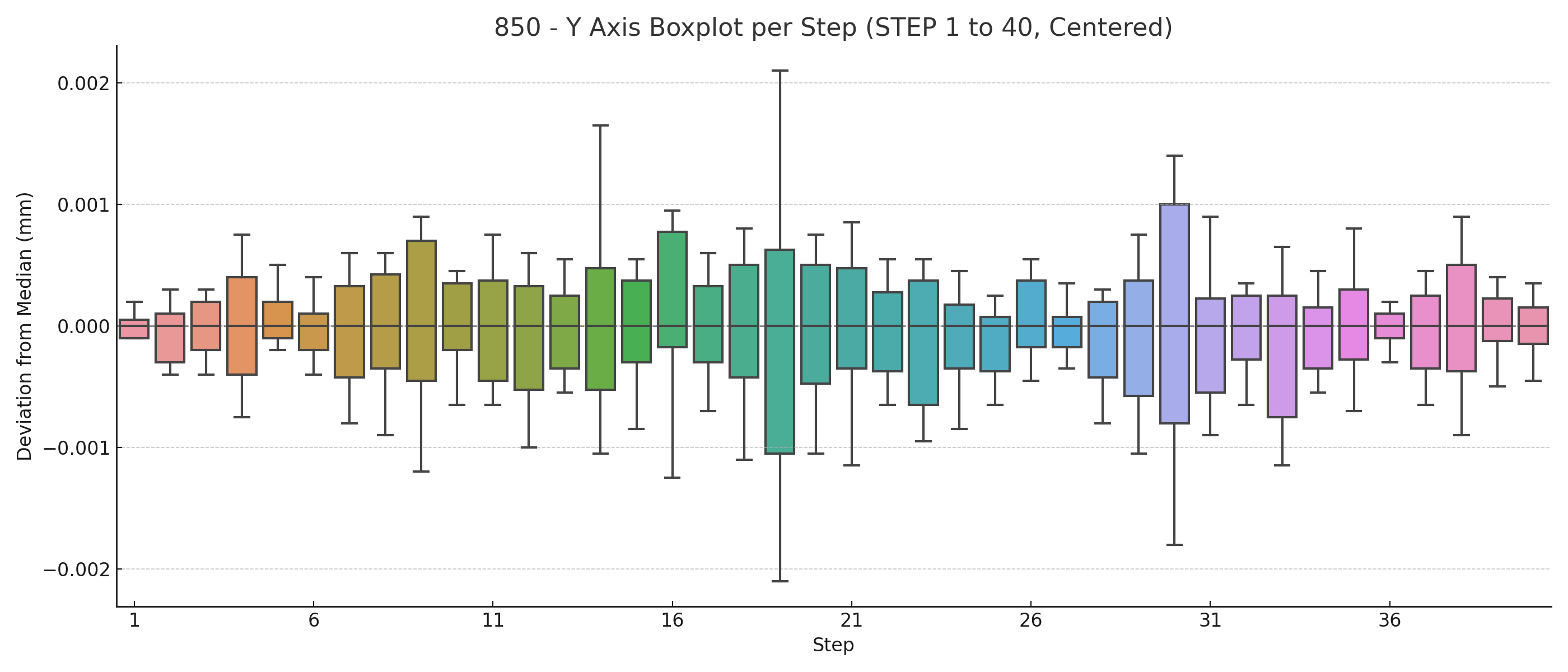
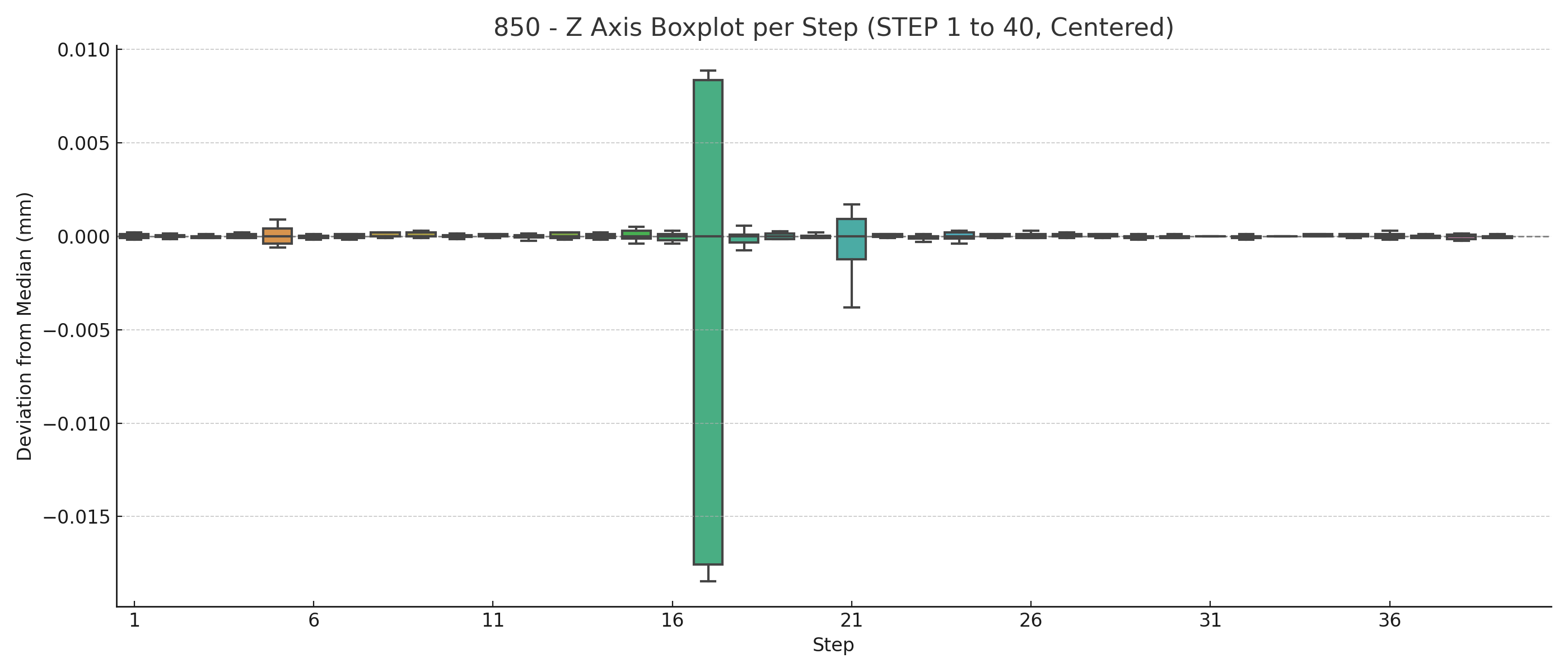
- 以中值为中心的箱线图,展示每步采样点的波动情况
XYZ 移动误差
xArm6 XYZ 误差图
850 XYZ 误差图
xArm 6
X 方向
Y 方向
Z 方向

850
X 方向
Y 方向
Z 方向
原始数据
原始数据下载:点击下载