UFactory 机械臂与 UbiRos 软夹爪的集成应用项目
项目概述
本项目演示了基于 UFACTORY 机械臂 和 UbiRos GNT2508 软夹爪 的应用。
遵循本指南后,用户可以将 UbiRos 软夹爪无缝集成到 xArm 开发者 Python SDK 中。 
硬件需求
硬件连接
UFactory 机械臂末端执行器 IO 接口定义
- 插入式接口
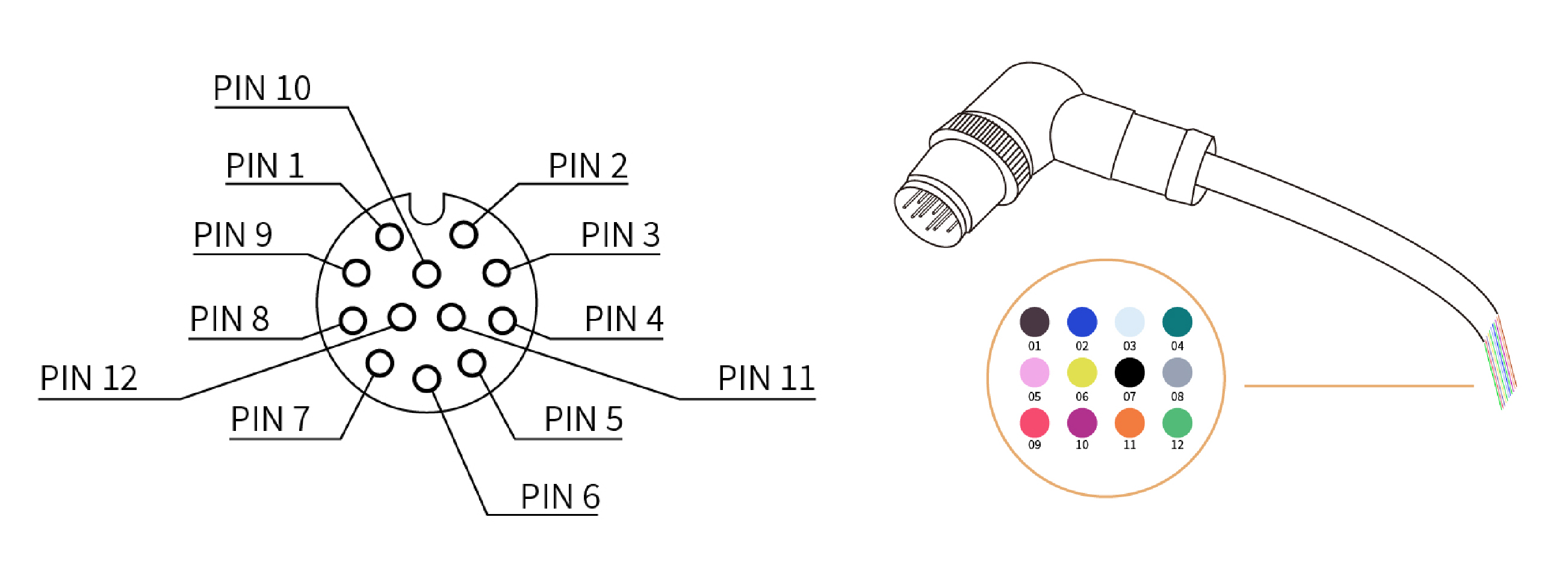
| 引脚 | 颜色 | 信号 | 引脚 | 颜色 | 信号 |
|---|---|---|---|---|---|
| 1 | 棕色 | +24V(电源) | 7 | 黑色 | 工具输出(TO0) |
| 2 | 蓝色 | +24V(电源) | 8 | 灰色 | 工具输出 1 (TO1) |
| 3 | 白色 | 0V(GND) | 9 | 红色 | 工具输入 0 (TI0) |
| 4 | 绿色 | 0V(GND) | 10 | 紫色 | 工具输入 1 (TI1) |
| 5 | 粉色 | 用户 485-A | 11 | 橙色 | 模拟输入 0 (AI0) |
| 6 | 黄色 | 用户 485-B | 12 | 浅绿色 | 模拟输入 1 (AI1) |
Gentle Duo GNT2508 夹爪
| 引脚 | 颜色 | 信号 |
|---|---|---|
| 1 | 灰色 | +24V (电源) |
| 2 | 亮粉色 | 0V (地线 GND) |
| 3 | 粉色 | 数字输入 1 (DI1) |
| 4 | 蓝色 | 数字输入 2 (DI2) |
| 5 | 绿色 | 数字输出 (DO) |
连接对应关系
| 连接 | UFactory 手臂末端信号 | UbiRos 夹爪信号 |
|---|---|---|
| 1 | 棕色 + 蓝色 (+24V) | 灰色 (+24V) |
| 2 | 白色 0V (GND) | 亮粉色 0V (GND) |
| 3 | 黑色 工具输出 0 (TO0) | 粉色 数字输入 1 (DI1) |
| 4 | 灰色 工具输出 1 (TO1) | 蓝色 数字输入 2 (DI2) |
| 5 | 紫色 工具输入 1 (TI1) | 绿色 数字输出 (DO) |
1. 设置夹爪
通过 Wi-Fi 连接到夹爪。网络名称为其序列号,密码为 __。在本地网络中访问其 IP 地址(通常类似 192.168.4.1)。点击 "配置 WiFi" 按钮,找到您的本地网络并连接。
2. 查找夹爪 IP 地址
登录您的 Wi-Fi 路由器(地址通常类似192.168.0.1或 192.168.1.1,并输入路由器背面的密码)。
导航到设备页面,通过夹爪的序列号找到夹爪。在夹爪的设置下,您会找到 IPv4 地址(类似:192.168.1.xxx)。请记下此地址。
3. 将 UbiRos 类添加到 Python SDK
在 Python SDK 中添加一个新文件夹,命名为 Ubiros。将以下代码添加到名为 ubiros_control.py 的文件中。
python
# xArm-Python-SDK/ubiros/ubiros_control.py
import socket
import time
from typing import Optional
class UbirosGripper:
"""
Ubiros Gentle 双指夹爪的高级封装。
支持手指 A 和 B 的命令、预设、偏移、感应、
速度/i/k 参数、EEPROM 保存、WiFi 重置等。
"""
def __init__(self, ip_address: str, port: int = 88,
timeout: float = 2.0, add_newline: bool = False,
read_reply: bool = False):
self.ip = ip_address
self.port = port
self.timeout = timeout
self.add_newline = add_newline
self.read_reply = read_reply
self._sock: Optional[socket.socket] = None
# ---------------- 连接管理 (CONNECTION MGMT) ----------------
def connect(self):
if self._sock:
return
print(f"Connecting to Ubiros gripper at {self.ip}:{self.port} ...")
s = socket.create_connection((self.ip, self.port), timeout=self.timeout)
s.settimeout(self.timeout)
time.sleep(0.15)
self._sock = s
print("Connected.")
def disconnect(self):
if self._sock:
try:
self._sock.close()
finally:
self._sock = None
print("Disconnected.")
def __enter__(self):
self.connect()
return self
def __exit__(self, exc_t, exc_v, exc_tb):
self.disconnect()
# ---------------- 低级发送 (LOW-LEVEL SEND) ----------------
def _send(self, body: str):
if not self._sock:
raise RuntimeError("Not connected. Call connect() first.")
suffix = ">\n" if self.add_newline else ">"
payload = (body + suffix).encode()
self._sock.sendall(payload)
if self.read_reply:
try:
return self._sock.recv(1024)
except socket.timeout:
return None
return None
# ---------------- 命令 (COMMANDS) ----------------
# 1–2. 移动单个手指: "a60>", "b45>"
def finger(self, finger_id: str, position: int):
if finger_id not in ("a", "b"):
raise ValueError("finger_id must be 'a' or 'b' for 2-finger gripper")
self._validate_pos(position)
return self._send(f"{finger_id}{position}")
# 3. 读取当前位置: "a?" or "b?"
def finger_position(self, finger_id: str):
if finger_id not in ("a", "b"):
raise ValueError("finger_id must be 'a' or 'b'")
return self._send(f"{finger_id}?")
# 组合命令: 例如, "a12>b12>"
def combined(self, command_string: str):
"""
示例:
combined("a12>b12>")
"""
if not command_string.endswith(">"):
raise ValueError("Combined command must end with '>'")
# Strip trailing > because _send() adds its own
return self._send(command_string.rstrip(">"))
# 4. 移动两个手指: "m55>"
def move_all(self, position: int):
self._validate_pos(position)
return self._send(f"m{position}")
# 友好辅助函数 (Friendly helpers)
def open(self):
return self.move_all(0) # 适度打开 (moderate open)
def close(self):
return self.move_all(65) # 完全关闭 (full close)
# 5. 设置预设: "p1:65>"
def set_preset(self, slot: int, position: int):
self._validate_slot(slot)
self._validate_pos(position)
return self._send(f"p{slot}:{position}")
# 6. 保存位置 N 到 EEPROM: "s1>"
def save_preset(self, slot: int):
self._validate_slot(slot)
return self._send(f"s{slot}")
# 7. 保存所有参数: "s>"
def save_all(self):
return self._send("s")
# 8. 跳转到预设: "g1>", "g2>", 等
def go_preset(self, slot: int):
self._validate_slot(slot)
return self._send(f"g{slot}")
# 9. 调整手指偏移: "o1:-5>", "o2:7>"
def set_offset(self, finger_number: int, offset: int):
if finger_number not in (1, 2):
raise ValueError("finger_number must be 1 or 2 for 2-finger gripper")
return self._send(f"o{finger_number}:{offset}")
# 10. 设置电流限制: "l2500>"
def set_current_limit(self, milliamps: int):
return self._send(f"l{milliamps}")
# 11. 读取电流限制: "l?"
def read_current_limit(self):
return self._send("l?")
# 12. 设置确认阈值: "t600>"
def set_threshold(self, milliamps: int):
return self._send(f"t{milliamps}")
# 13. 读取负载电流: "f?"
def read_load_current(self):
return self._send("f?")
# 14. 读取或设置位置控制系数: "k?" / "k87>"
def read_k(self):
return self._send("k?")
def set_k(self, value: int):
return self._send(f"k{value}")
# 15. 读取或设置最大速度: "v?" / "v65>"
def read_velocity(self):
return self._send("v?")
def set_velocity(self, value: int):
return self._send(f"v{value}")
# 16. 读取或设置电流控制系数: "i?" / "i79>"
def read_i(self):
return self._send("i?")
def set_i(self, value: int):
return self._send(f"i{value}")
# 17. 重置 Wi-Fi: "x>"
def wifi_reset(self):
"""
强制夹爪再次进入 AP 模式。
调用此函数后,您必须重新配置 Wi-Fi!
"""
return self._send("x")
# ---------------- 验证 (VALIDATION) ----------------
@staticmethod
def _validate_pos(pos: int):
if not (0 <= pos <= 100):
raise ValueError("Position must be 0–100 percent")
@staticmethod
def _validate_slot(slot: int):
if slot not in (1, 2, 3, 4):
raise ValueError("Preset slot must be 1,2,3,4")4. 用机械臂控制夹爪
示例代码:
python
gripper_ip = "192.168.1.xxx" ###TODO: 替换为您的夹爪 IP 地址
speed=55
with UbirosGripper(gripper_ip, read_reply=True, add_newline=False) as grip:
grip.open() # m0>
time.sleep(0.1)
grip.set_preset(1, 30) # p1:30>
grip.go_preset(1) # g1>
time.sleep(0.1)
grip.close() # m65>NOTE
夹爪的 IP 地址(gripper_ip)必须被修改为实际地址。