UFACTOR视觉演示
项目概述
ufactory_vision 是一个基于 UFACTORY(深圳市众为创造科技有限公司) 机械臂的视觉抓取演示项目。用户可以通过本项目快速实现基于视觉的物体检测和抓取。
硬件要求
示例脚本的硬件配置
| 机械臂型号 | 相机型号 | 末端执行器 |
|---|---|---|
| xArm 5/6/7或850 | Intel Realsense D435/D555 或 Luxonis OAK-D-Pro-PoE | UFACTORY 机械爪G1/G2 |
| Lite 6 | Intel Realsense D435 或 Luxonis OAK-D-Pro-PoE | Lite 6 真空吸头 |
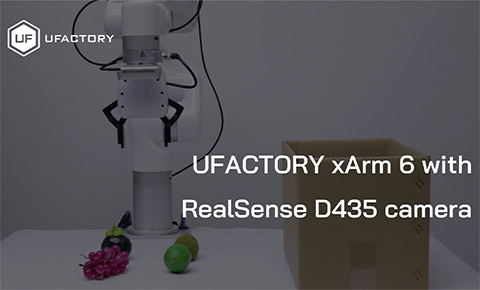
- 基于 Intel Realsense D435 相机的配置:Readme
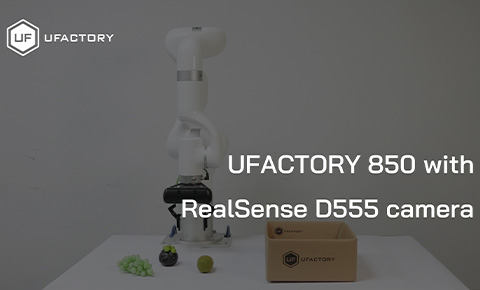
- 基于 Intel Realsense D555 相机的配置:Readme
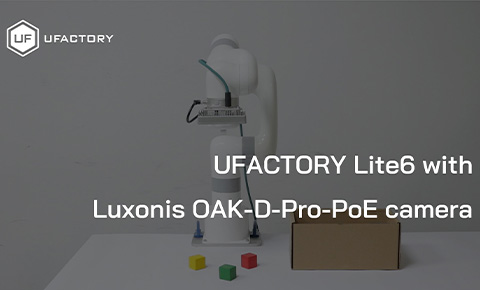
- 基于 Luxonis OAK-D-Pro-PoE 相机的配置:Readme
视频演示
- 定制850(1000M内置网线) + Realsense D555 + 内部网线走线 + UFACTORY 机械爪G2
- xArm6 + Realsense D435 + 外部USB走线 + UFACTORY 机械爪G1
- Lite6 + Luxonis OAK-D-Pro-PoE + 外部网线走线 + 真空吸头
许可证
本项目采用 BSD 3-Clause 许可证。详情请查看LICENSE文件。
致谢
我们的演示项目基于以下开源项目构建: