为什么当我调整 Roll 和 Yaw 时机械臂表现相同?
问题一: 为什么我用SDK获取到的Roll/Pitch/Yaw ,与studio中实时控制页面显示的不一致?
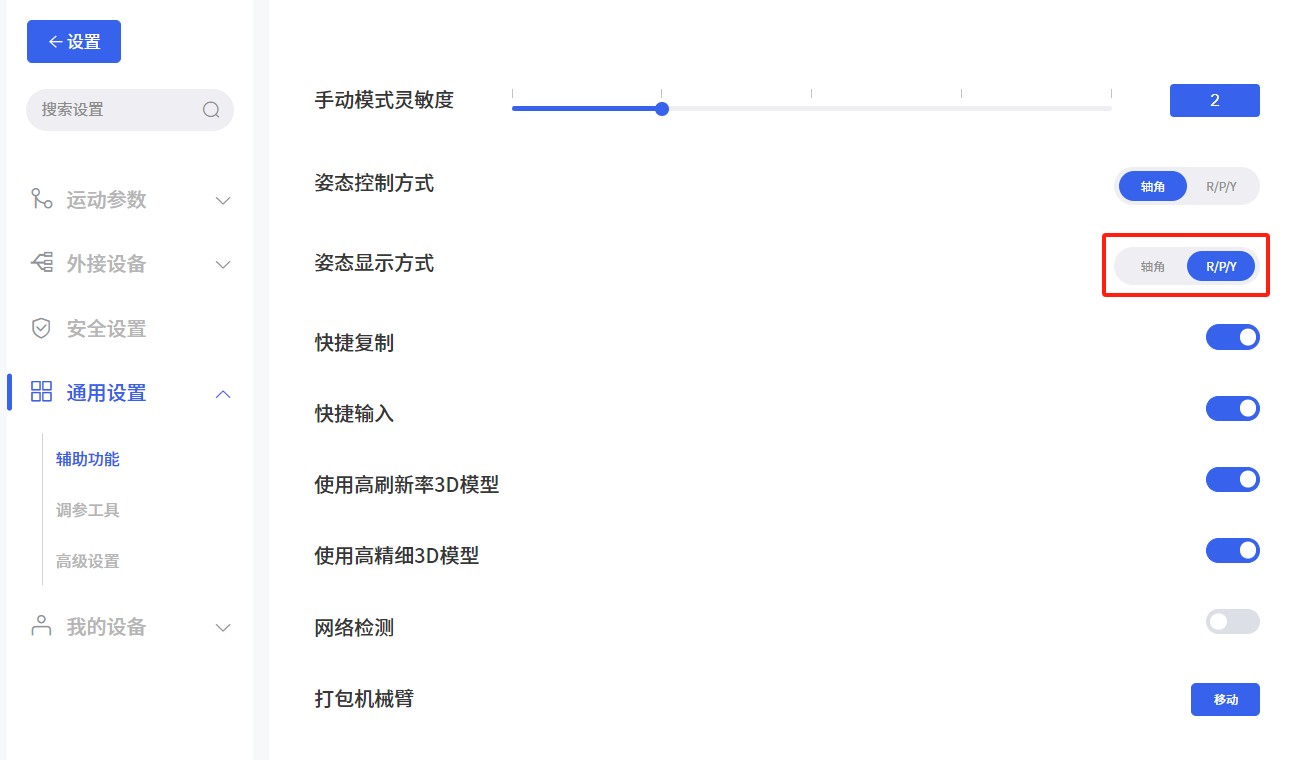
SDK默认读到的是Roll/Pitch/Yaw,而在studio默认显示的轴角Rx,Ry,Rz。 可以通过此页面进行调整,显示为Roll/Pitch/Yaw。
问题二: 为什么当我调整 Roll 和 Yaw 时机械臂表现相同?
一般发生在Pitch=±90°时,就是云台锁,这时手臂将失去一个自由度。 机械臂上的云台锁有2个典型特征。
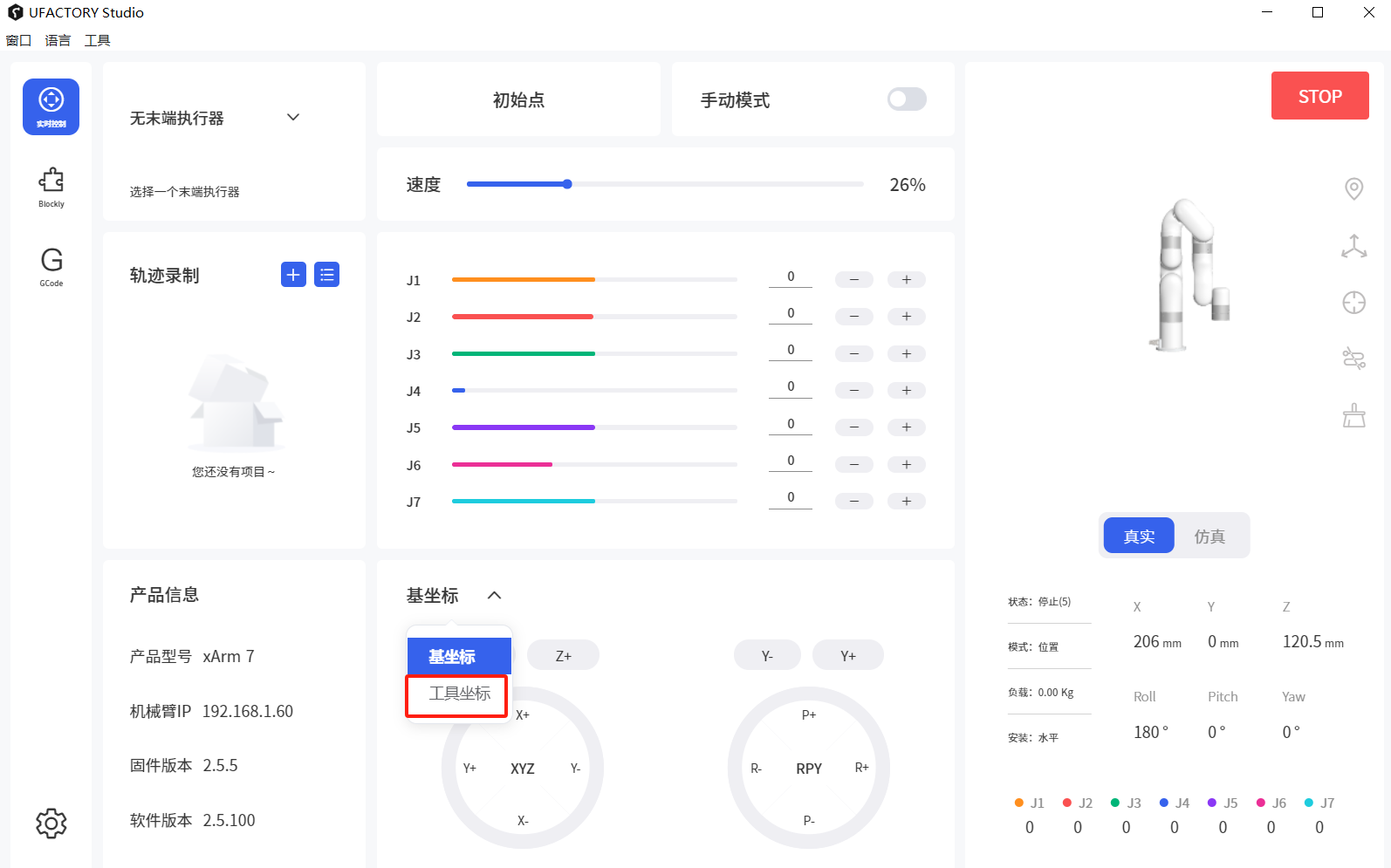
1.当机械臂处于Pitch=±90°的位置时,调整机械臂的Roll与调整Yaw的结果相同。 您可以通过切换到 UFACTORY xArm Studio 上的“工具坐标”或使用 UFACTORY xArm Python 或 C++ SDK 的“set_tool_position”来绕过此问题。
2.当机械臂在Pitch=±90°的位置时,机械臂会报告一个与你发送给机械臂的位置不同的Roll和Yaw,由于机械臂将失去一个自由度,因此我们保持Yaw=0°。 roll值可参考以下矩阵。 考虑roll、pitch和yaw的值分别为 α、β 和 γ。 TCP 方向的旋转矩阵(R)应为
.DvUW5A3O.png)
可以用这个公式进行验证: (Roll_send-Roll_report)+(Yaw_send-Yaw_report)=0或±360 °
示例:
将手臂移动到位置: [350, 0, 200, 90, 0, 0]
发送位置 [350, 0, 200, 0, 90, 30] 给手臂.
检查手臂的位置,应该是: [350, 0, 200, -30, 90, 0]
如果您想了解更多关于 “云台锁” 的信息,请参阅: