如何重置关节伺服零点
适用产品:XF1304 ,XI1304,XS1304,UF850
适用固件版本:2.4.0+
适用studio版本:2.4.0+
注意:请在重置之前联系我们确认一下,否则可能会影响保修
前提准备
xArm5/xArm6——关节3
移除所有末端负载,把TCP负载设置为0
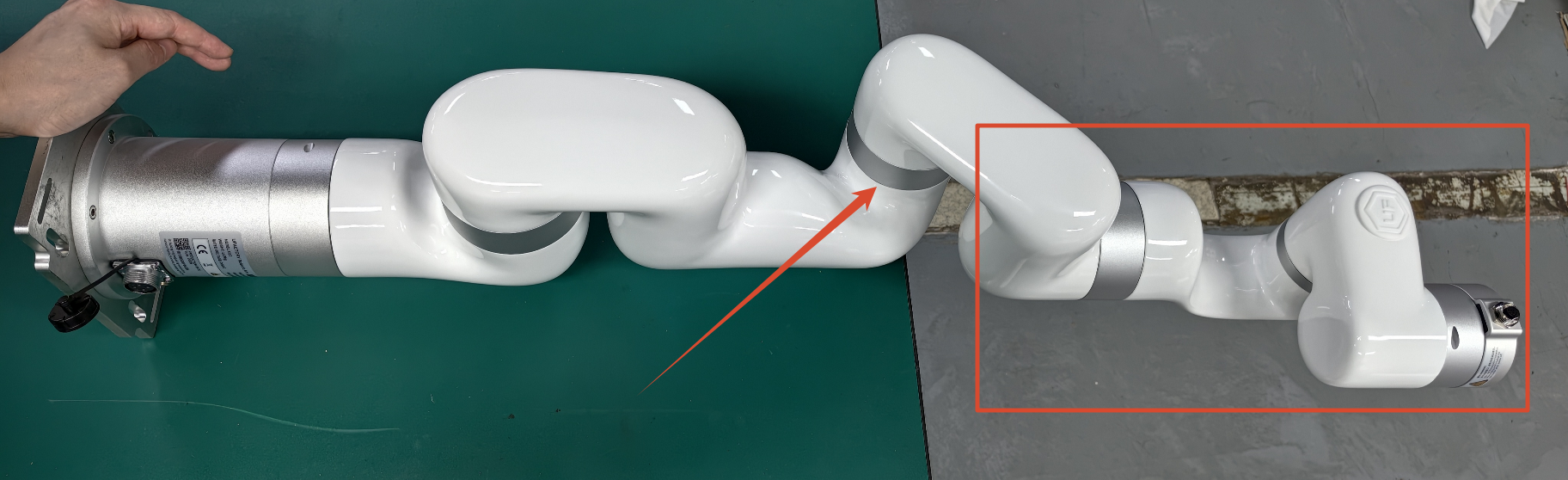
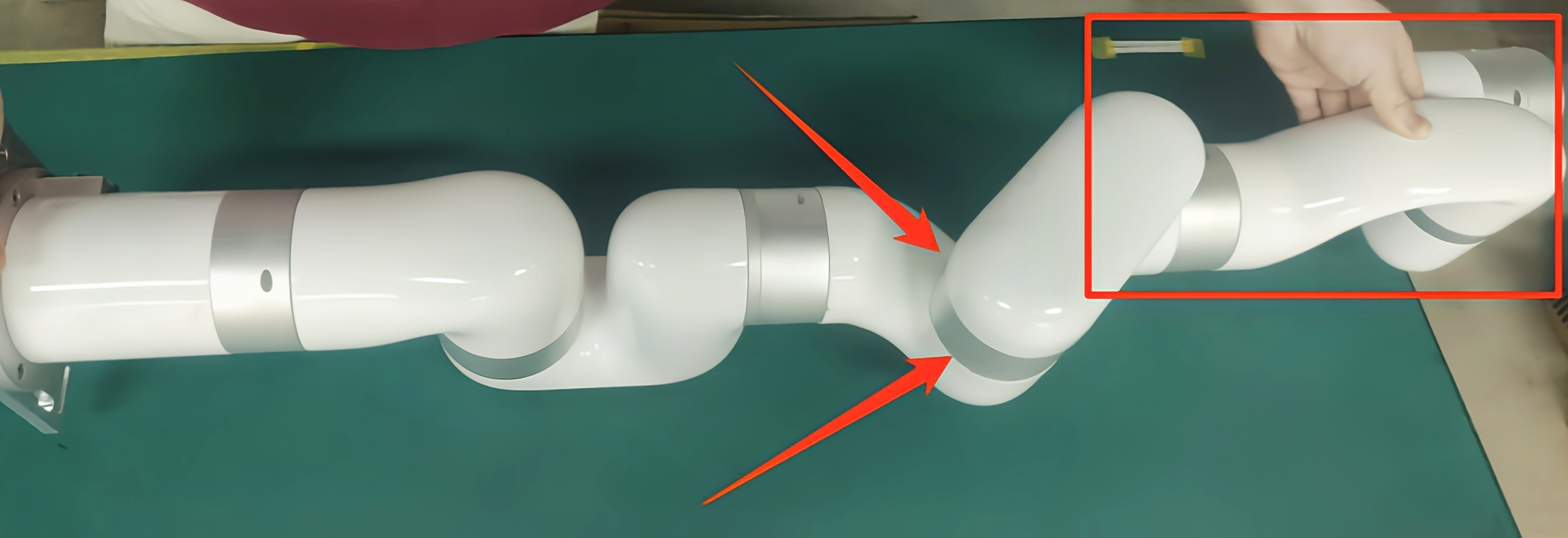
把手臂平放在水平桌面上,如下图所示,把 J3 转到大概-175°,确保J4 J5 J6是悬空的,然后用手扶着机械臂,保证机械臂保持不动。
UF850——关节4
移除所有末端负载,并把TCP负载设置为0
确保手臂回到零点位置
xArm7——关节4
移除所有末端负载,并把TCP负载设置为0
把手臂平放在水平桌面上,如下图所示,把 J4 转到大概175°,确保J5 J6 J7是悬空的,然后用手扶着机械臂,保证机械臂保持不动。
重置命令
- 按下急停再松开
- 不要使能机械臂,在设置—通用设置—调参工具—关节界面下方,发送重置伺服零点指令(指令请联系技术支持support@ufactory.cc),之后J*会轻微转动,你将会听到咔哒声,然后关节不动了,这表明重置结束,然后拍下急停再松开
- 重启整个系统,然后使能机械臂
- 进入studio的设置—通用设置—调参工具—关节界面,解锁关节 * ,然后把关节 * 移动到原始零点,发送
D13 I*,按下急停再松开使得指令生效,这将使关节J*设置到0°