如何判断六维力矩传感器是否损坏
一、排查步骤
按下急停按钮
机械臂末端只保留六维力矩传感器,移除其他末端执行器及线缆
松开急停按钮并使能机械臂,控制机械臂回到“零点姿态”(即所有关节角度均为0°)
- 注意:移动前请确认手臂周围没有障碍物,以确保安全并避免意外磕碰

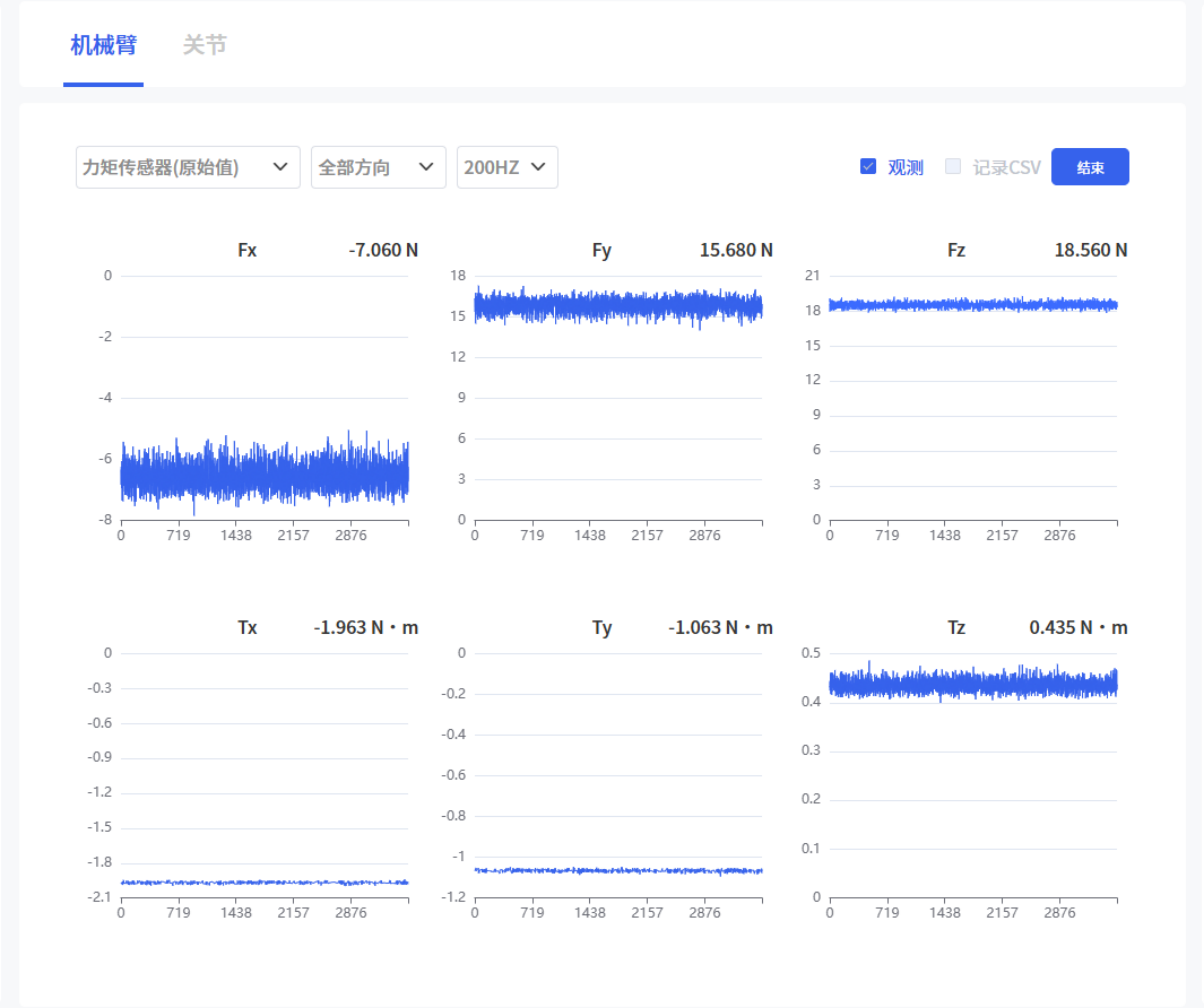
- 在 UFACTORY Studio 的 “调参工具” 中,观测力矩传感器(原始值)

- 将观测到的原始值与静态原始值范围进行对比,若原始值超出范围,则表示力矩传感器已损坏。
- 静态原始值范围:
| Fx(N) | Fy(N) | Fz(N) | Tx(N·m) | Ty(N·m) | Tz(N·m) |
|---|---|---|---|---|---|
| [-60, 60] | [-60, 60] | [-60, 60] | [-2, 2] | [-2, 2] | [-2, 2] |
二、解决方案
若经过上述排查确认传感器原始值超出范围,则表示力矩传感器已损坏。请联系 UFACTORY 技术支持进行售后处理,在反馈时提供以下相关信息:
- 观测到的原始值截图
- 力矩传感器SN
- 力矩传感器外观照片/视频
- 力矩传感器是否经历过碰撞等