如何做摩擦力辨识
NOTE
做摩擦力辨识前,请联系技术支持确认
1. 安全提示
- 清空臂展空间:辨识过程中,机械臂会以不同速度进行大范围运动。请确保机械臂全臂展范围内没有任何障碍物、人员或线缆干扰。
- 移除末端负载:进行摩擦力辨识时,请移除所有末端执行器及线缆,确保机械臂末端处于空载状态。
2. 准备工作
负载设置为0:在 UFACTORY Studio 的“TCP设置”中,将负载重量和偏移设为 0。
完全空载:卸下末端工具,并取下末端外部接线 。
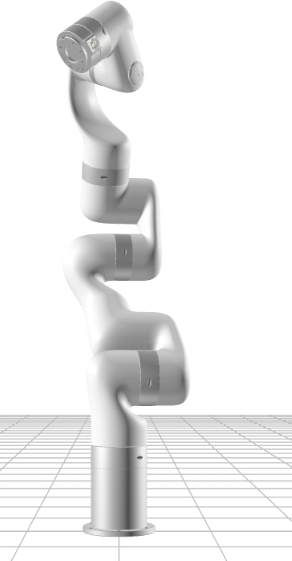
- 安装方向设置为水平:在 UFACTORY Studio 的“坐标系”设置中,将安装方向设置为水平(0°,0°)。机械臂需水平安装(如下图所示)。
使能手臂:确保机械臂处于 Enable (使能)状态,无报错代码。
空间确认:确保机械臂臂展范围空间空旷。
软件准备:下载并解压 xarm-tool-gui
3. 操作步骤
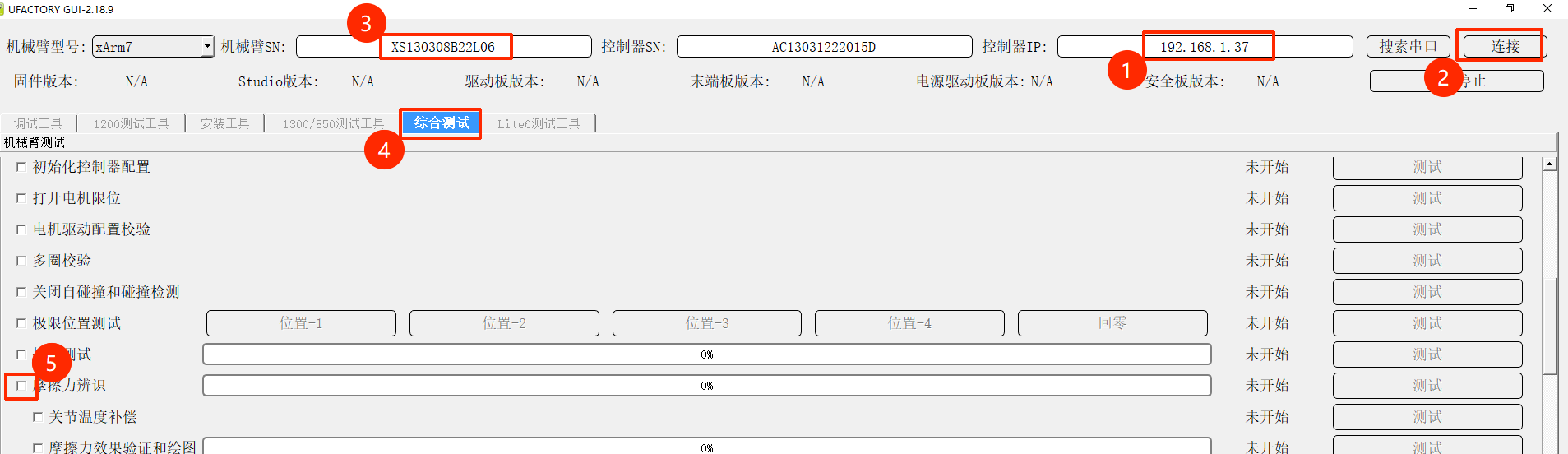
运行 xarm-tool-gui
输入控制器ip,点击【连接】
检查机械臂SN输入框与机械臂底座贴纸SN是否一致,若不一致,则手动输入底座贴纸SN到机械臂SN输入框中
切换到【综合测试】,取消勾选【所有项目】,仅勾选【摩擦力辨识】
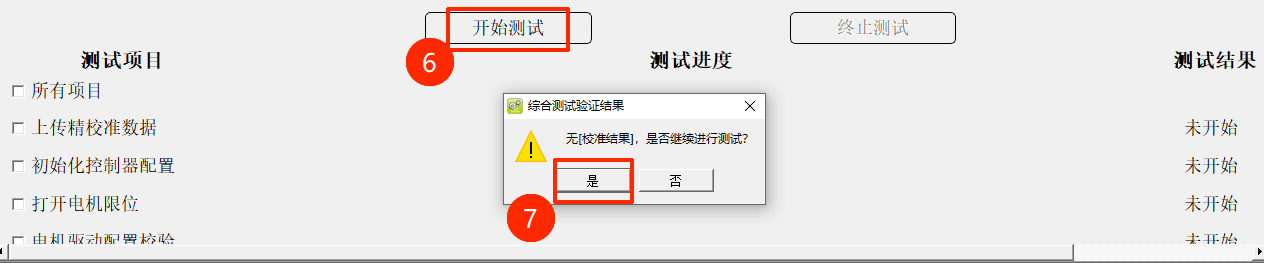
点击【开始测试】,会弹出确认框,再次确认周围环境安全后点击【是】
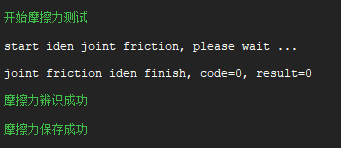
开始辨识后手臂持续5分钟左右的运动
辨识完成后,日志区域会显示摩擦力辨识成功、摩擦力保存成功
按下急停按钮 → 等待 5 秒 → 旋起急停 → 重新使能手臂即完成