如何在末端使用透传功能?
当末端工具支持RS-485通讯但不支持标准Modbus RTU协议时,可使用末端透传功能,此功能将数据直接转发至末端板,不进行任何数据处理。
硬件连接
机械臂末端引角定义图如下,需要连接:
两组24V和GND都要接上。 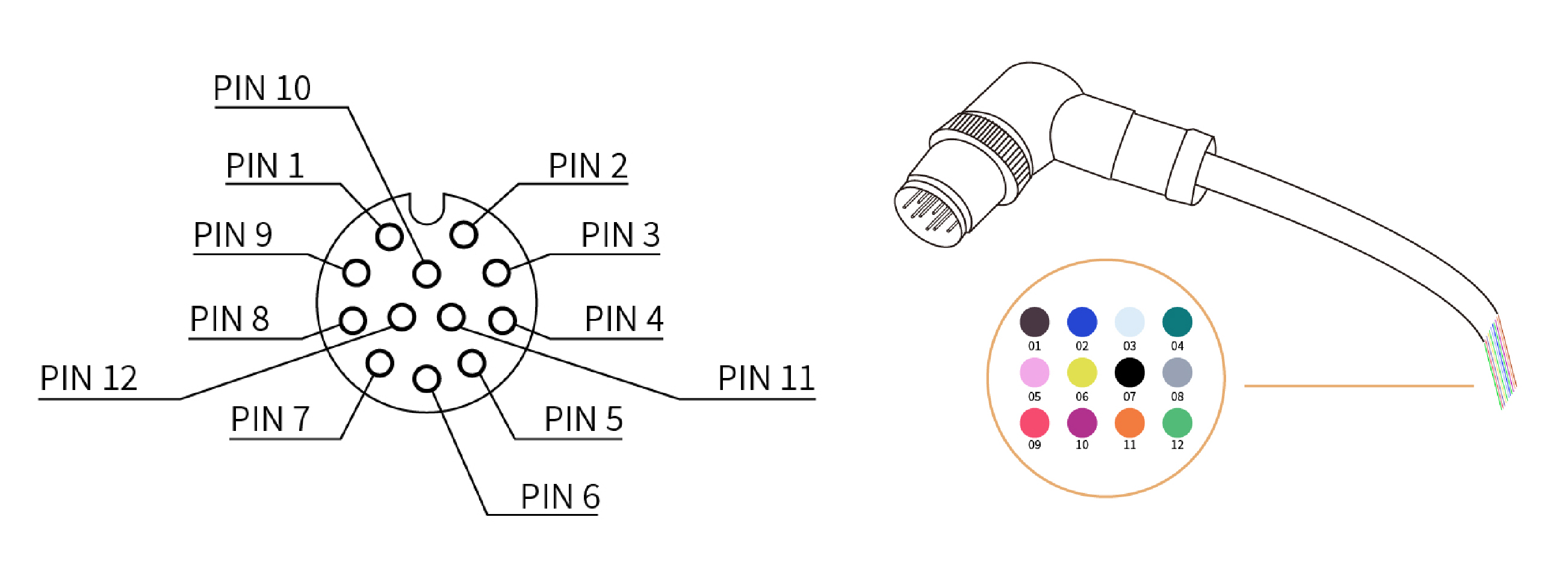
| 颜色 | 信号 | 颜色 | 信号 |
|---|---|---|---|
| 棕(PIN1) | +24V(电源) | 白(PIN3) | GND |
| 蓝(PIN2) | +24V(电源) | 绿(PIN4) | GND |
| 粉(PIN5) | 用户485-A | 黄(PIN6) | 用户485-B |
控制
- 末端波特率和末端工具波特率需要保持一致,末端默认波特率为2M;
- 末端超时时间默认为50ms,需要根据末端工具的超时时间调整;
UFACTORY Studio控制
版本要求:≥V2.7.0;
进入设置-外接设备-RS485界面。 可选参数:
- RS-485端口:选择机械臂;
- 波特率;
- 协议:选择透传;
- 超时时间;

注意:修改完参数后请点击保存按钮。
Python SDK控制
1. 设置波特率
python
code = arm.set_tgpio_modbus_baudrate(2000000)2. 设置超时时间
is_transparent_transmission需要设置为True,默认为False。
python
code = arm.set_tgpio_modbus_timeout(timeout=1000, is_transparent_transmission=True)3. 发送相应的RS485数据
is_transparent_transmission需要设置为True,默认为False。
use_503_port需要设置为True,默认用502端口。
python
#open gripper
code, ret = arm.getset_tgpio_modbus_data(datas=[0x08, 0x10, 0x07, 0x00, 0x00, 0x02, 0x04, 0x00, 0x00, 0x03, 0x20, 0xFA, 0x2B], is_transparent_transmission=True, use_503_port=True)
print('open gripper, code={}, ret={}'.format(code, ret))
time.sleep(0.5)
#close gripper
code, ret = arm.getset_tgpio_modbus_data(datas=[0x08, 0x10, 0x07, 0x00, 0x00, 0x02, 0x04, 0x00, 0x00, 0x00, 0x00, 0xFB, 0x03 ], is_transparent_transmission=True, use_503_port=True)
print('close gripper, code={}, ret={}'.format(code, ret))
time.sleep(0.5)