如何判断关节伺服零点是否丢失
下面以xArm6为例说明
适用产品:XF1304,XI1304,XS1304,UF850
适用固件版本:2.4.0+
适用studio版本:2.4.0+
应用场景:如果 TCP 负载设置正确,碰撞检测灵敏度≤3,但软件仍不断报告 C31 或 S15 错误,则伺服零点可能已丢失。
如果机械臂是在 2024 年 7 月之后购买的,我们备份了原始关节伺服零点数据,请参考获取CSV文件章节部分操作,将 CSV 文件提供给我们,我们将在内部进行数据比对。
如果是在2024-7月之前购买,请参考获取电流图表章节部分操作,获取对应关节的电流
获取CSV文件
把关节移动到零点位置[0,0,0,0,0,0]
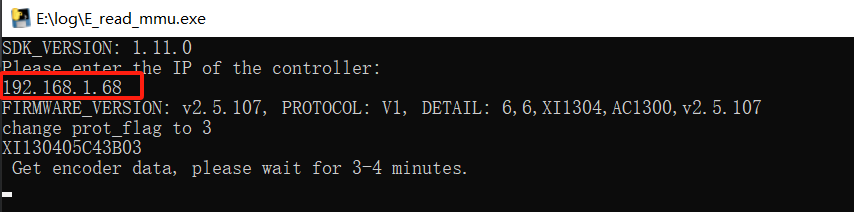
下载E_read_mmu.exe, 然后启动。(只有window版本)
输入控制器的ip, 进行连接
等待2-3分钟后,程序将自动生成一个csv文件
获取电流图表
请按照以下步骤检查相应关节的电流。
移除所有末端负载,设置TCP负载和偏移为0
进入”设置-通用设置-高级设置-碰撞检测“ ,关闭碰撞检测
把手臂关节移动到零点位置[0,0,0,0,0,0,]
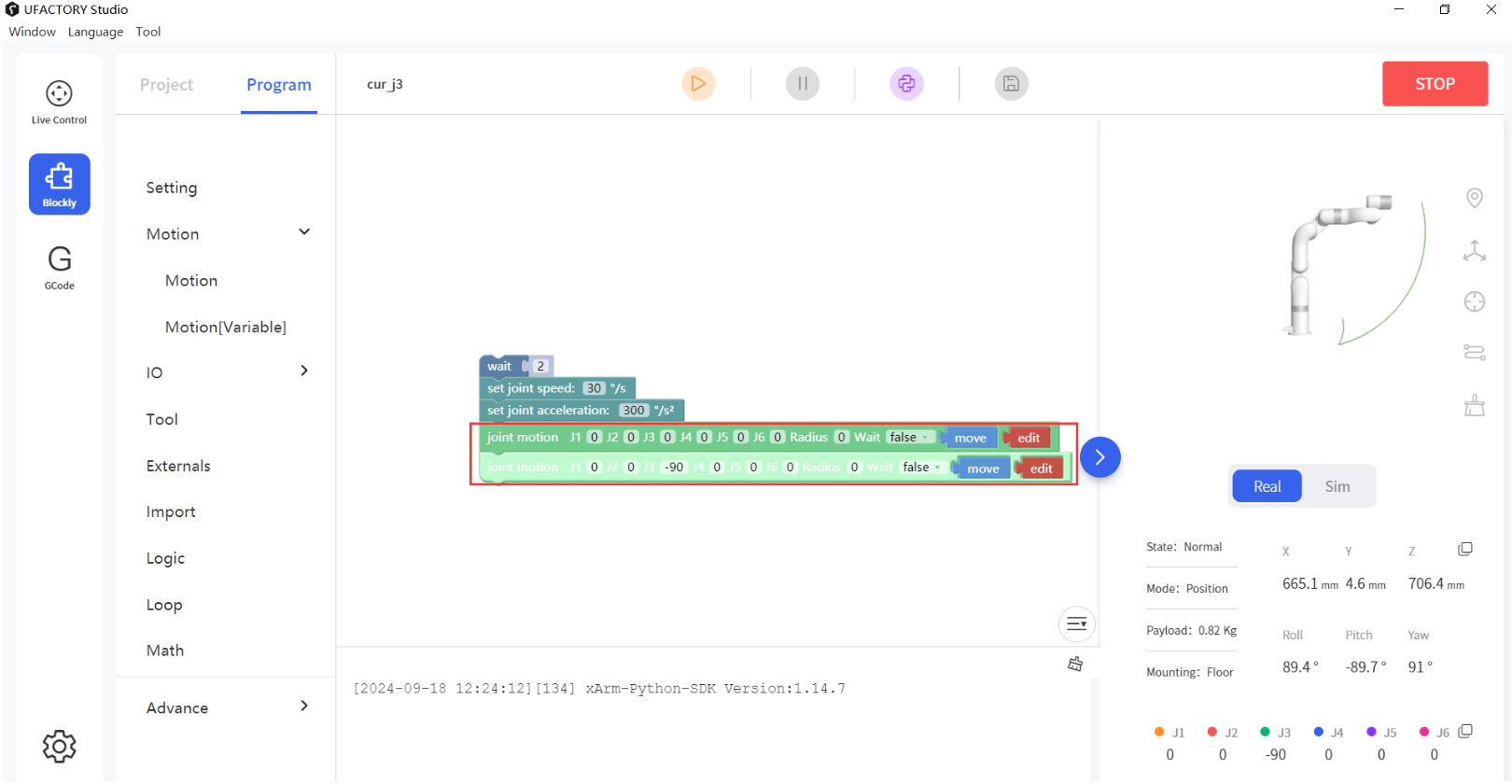
启动UFactory Assist,选择“实际关节电流”,J3,200HZ,点击“观测”,然后开始
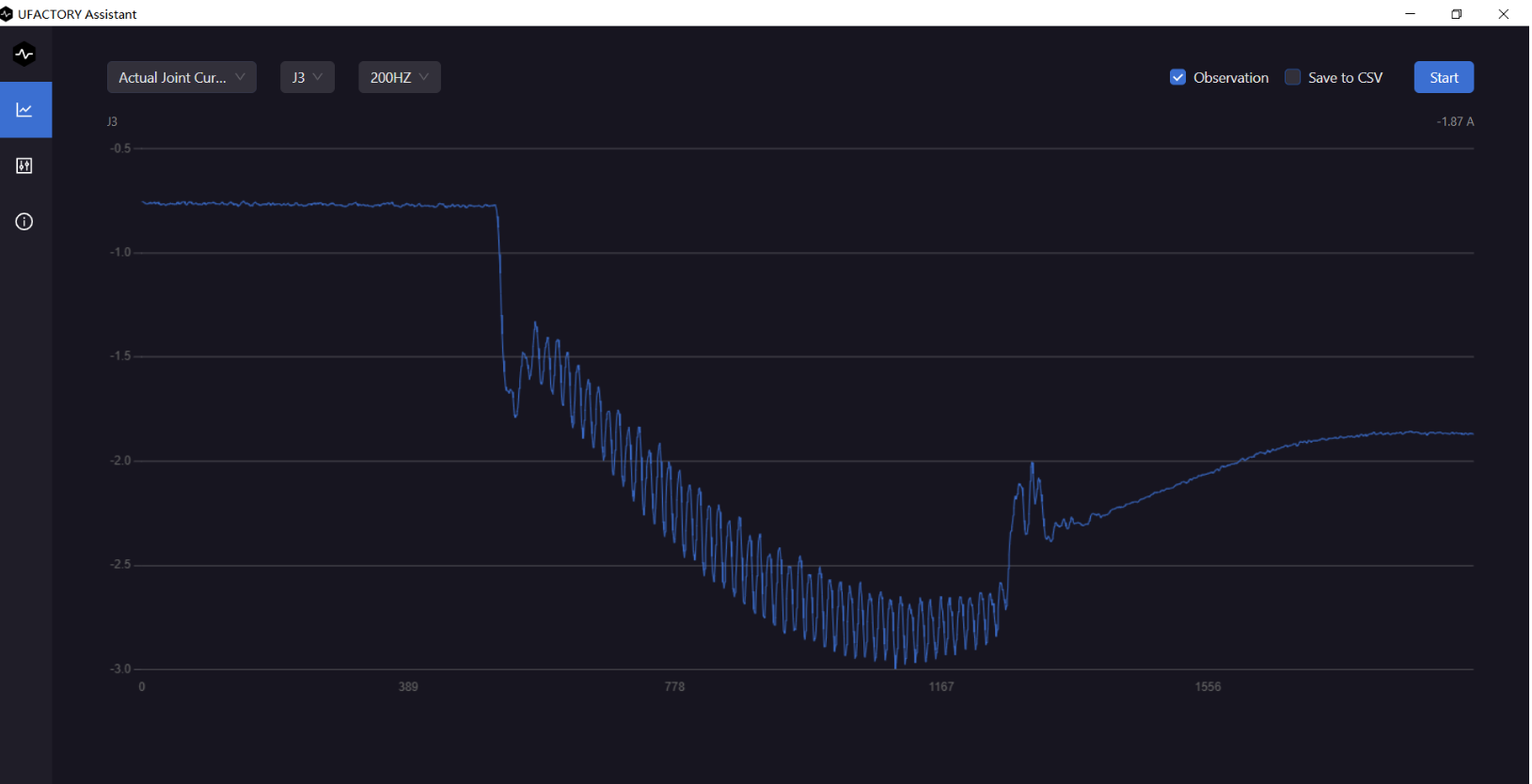
运行Blockly项目,在UFactory Assist里面点击“结束”,然后把电流截图发给我们
电流应该为2A左右,请把截图发我们确认。