UFACTORY机械臂与灵巧手RH56DFX
项目概述
此项目是基于 UFACTORY机械臂 和 INSPIRE-ROBOTS 仿人灵巧手RH56DFX系列 的应用演示。用户可以通过UFACTORY Studio软件快速控制灵巧手,实现快速抓取等应用。
以下视频使用灵巧手抓取鸡蛋和橙子,到用电钻钻纸板,以及控制电脑鼠标切换网页。

硬件要求
- 机械臂:UFACTORY 850, xArm系列(1305版本) (深圳市众为创造科技有限公司)
- 灵巧手:因时-RH56DFX-左手, 因时-RH56DFX-右手 (因时机器人)
硬件连接
机械臂末端定义
- 插接式
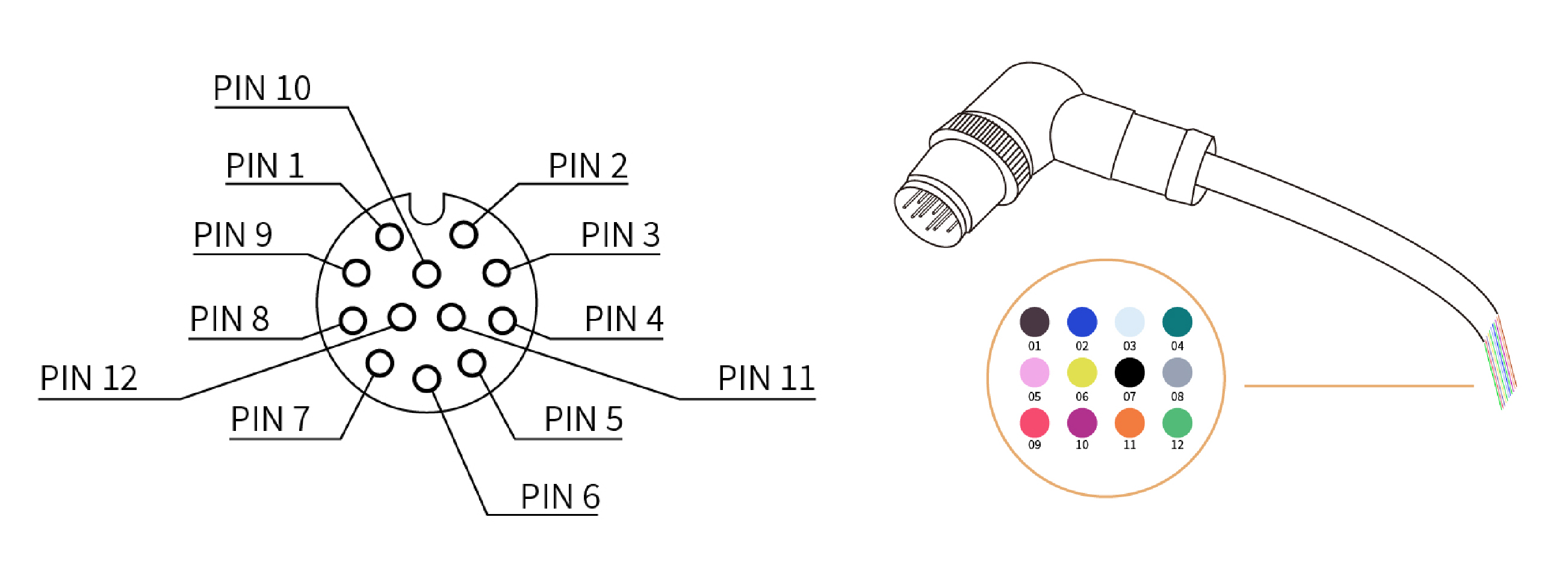
| 线序 | 颜色 | 信号 | 线序 | 颜色 | 信号 |
|---|---|---|---|---|---|
| 1 | 棕 | +24V(电源) | 7 | 黑 | 工具输出0(TO0) |
| 2 | 蓝 | +24V(电源) | 8 | 灰 | 工具输出1(TO1) |
| 3 | 白 | 0V(GND) | 9 | 红 | 工具输入0(TI0) |
| 4 | 绿 | 0V(GND) | 10 | 紫 | 工具输入1(TI1) |
| 5 | 粉 | 用户485-A | 11 | 橙 | 模拟输入0(AI0) |
| 6 | 黄 | 用户485-B | 12 | 浅绿 | 模拟输入1(AI1) |
- 触点式
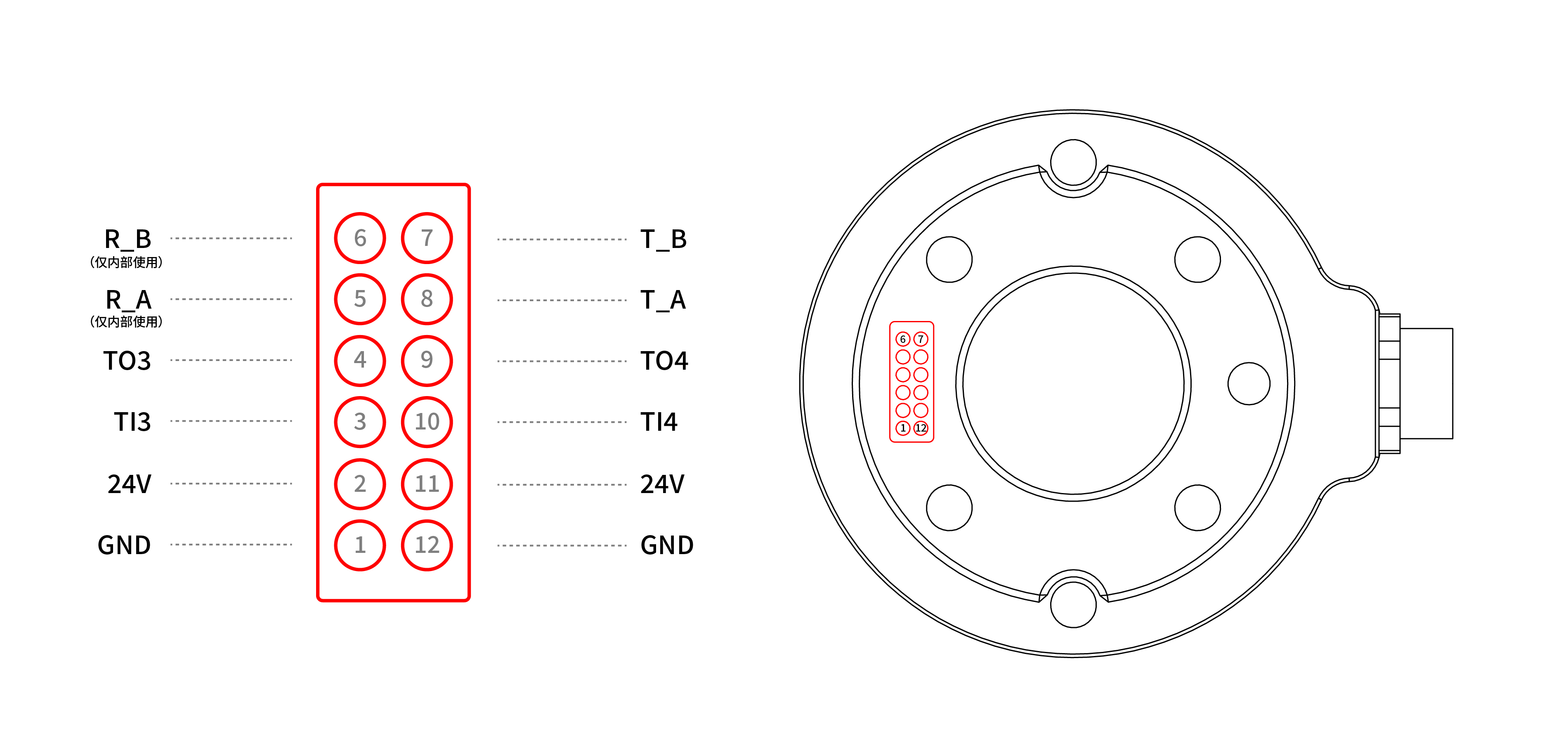
RH56DFX灵巧手定义
注意: 机械臂末端和灵巧手无法直接连接,可联系因时机器人提供转接航空头。
控制方式
UFACTORY Studio控制
UFACTORY Studio版本: ≥V2.7.0
1.实时控制界面控制
选择 因时-RH56DFX-左手 或 因时-RH56DFX-右手,弹框选择是将机械臂波特率设置为115200。可调参数:位置、力、速度; 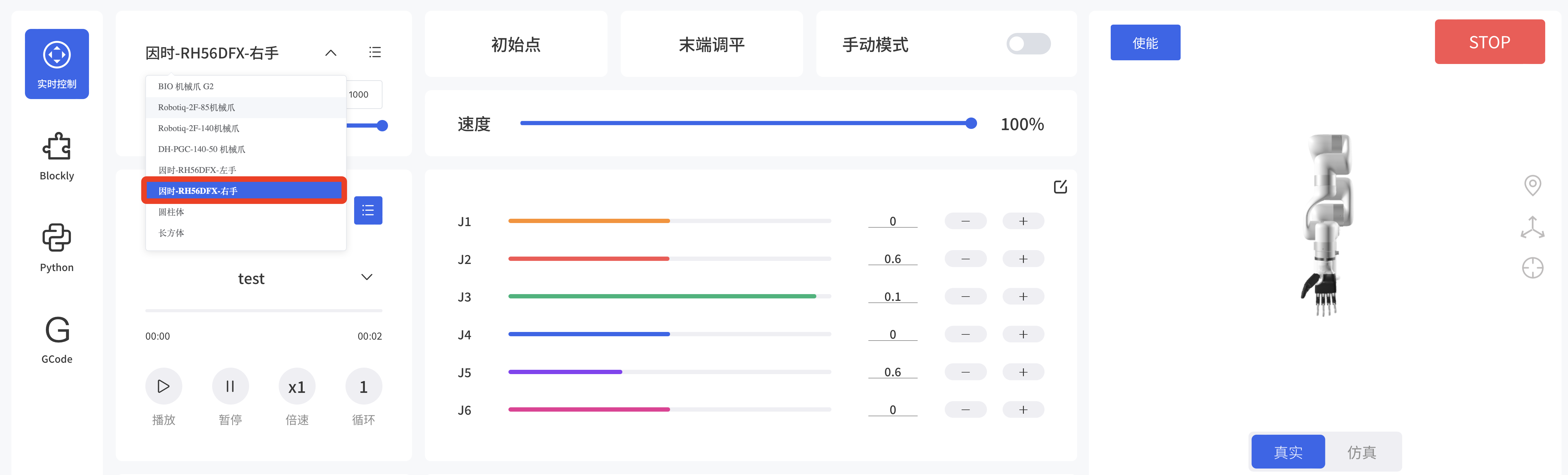

2.TCP设置
进入设置-运动参数-TCP设置,选择 因时RH56DFX。 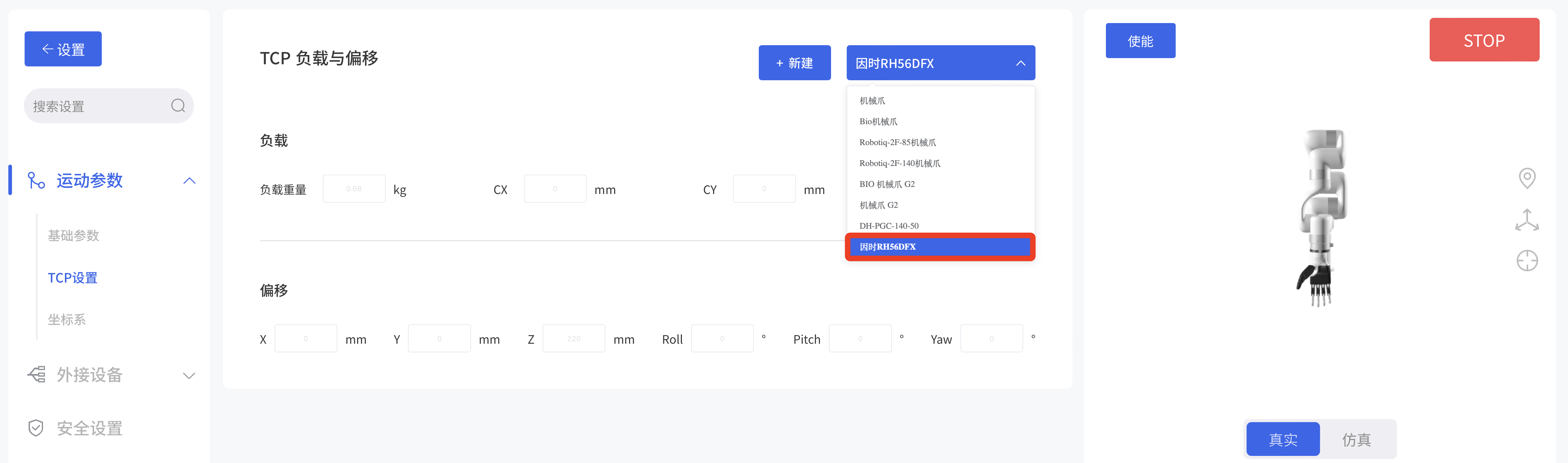
3.Blockly控制
Blockly模块为灵巧手提供两个块,可以选择控制手整体,或单个手指。 
可选参数:
- 手指:小指、无名指、中指、食指、大拇指弯曲、大拇指旋转、手整体
- 位置:0-1000
- 速度:0-1000
- 力:0-1000
- 是否等待:是否等待命令结束再发送下一条指令(同步或异步逻辑)
Python SDK控制
1.设置UFACTORY机械臂末端波特率
python
code = arm.set_tgpio_modbus_baudrate(115200)2.进行485通讯
python
code, res_data = arm.getset_tgpio_modbus_data(modbus, timeout=100)