如何重置 xArm 机械爪的零位?
产品:xArm 机械爪
步骤:
- 按下急停按钮。
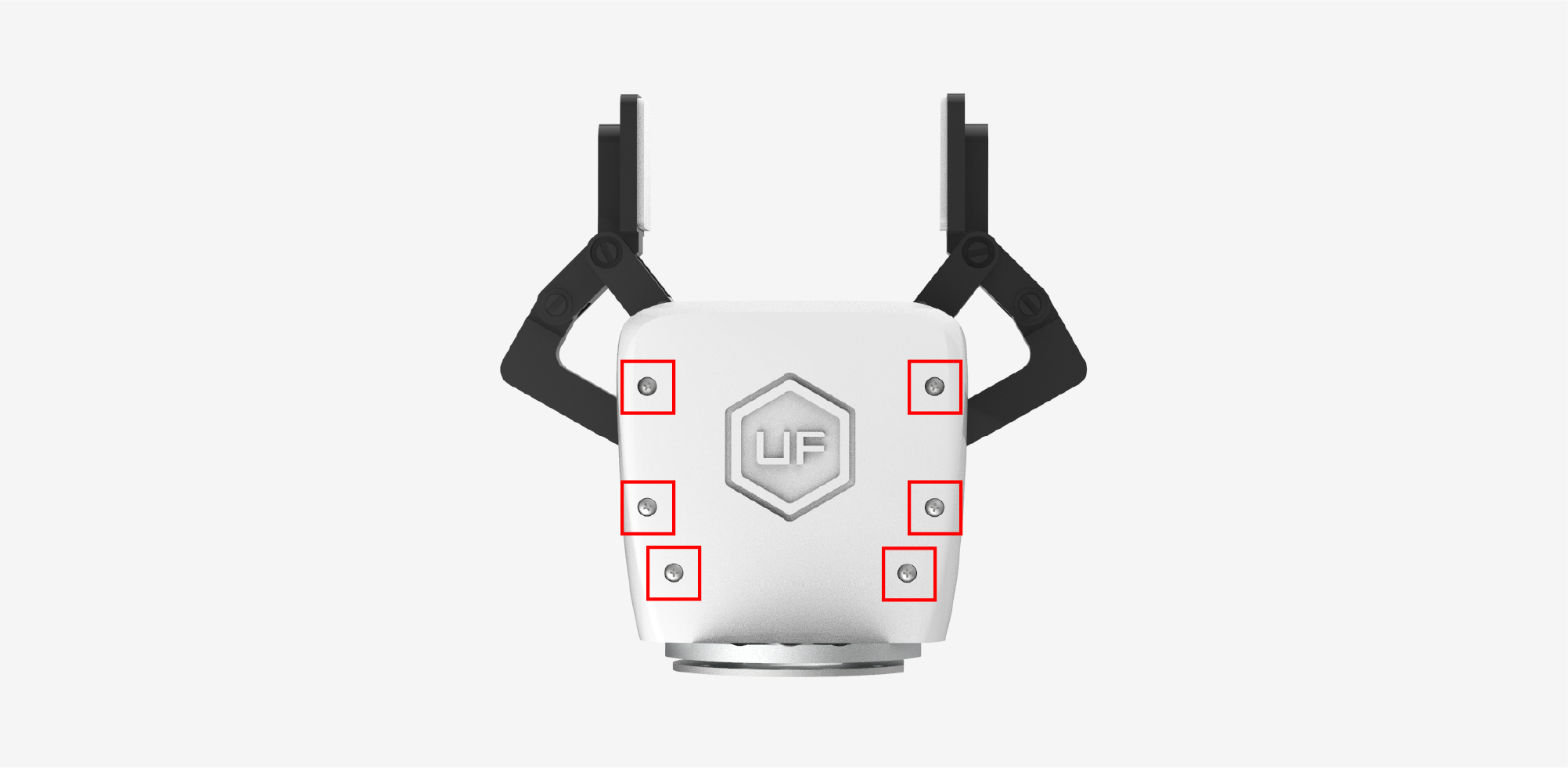
- 拆下机械爪盖上的 6 颗螺丝,手动旋转机械爪的电机,使机械爪闭合。
- 松开急停按钮并启用机械臂。
- 将以下 Python 代码复制到 UFactoryStudio 或本地 Python IDE 中。
- 修改为对应的 IP 地址。
- 运行脚本,脚本会将机械爪的当前位置设置为 0。按下急停按钮并松开以生效。
- 尝试控制机械爪。
NOTE
仅适用于 xArm 机械爪,不适用于 xArm 机械爪 G2
Python 代码:
python
import os
import sys
import time
sys.path.append(os.path.join(os.path.dirname(__file__), '../../..'))
from xarm.wrapper import XArmAPI
arm = XArmAPI('192.168.1.202')
time.sleep(0.5)
if arm.warn_code != 0:
arm.clean_warn()
if arm.error_code != 0:
arm.clean_error()
def bytes_to_u16(data):
"""大端字节序"""
data_u16 = data[0] << 8 | data[1]
return data_u16
def u16_to_bytes(data):
"""大端字节序"""
bts = bytes([data // 256 % 256])
bts += bytes([data % 256])
return bts
print(arm.get_gripper_version())
ret = arm.core.gripper_modbus_r16s(0x0105, 1)
# print(ret)
print("gripper io ctrl mode:%d"%bytes_to_u16(ret[5:7]))
ret=arm.core.gripper_modbus_w16s(0x1105,u16_to_bytes(1),1)
print(ret)
ret = arm.core.gripper_modbus_r16s(0x0105, 1)
# print(ret)
print("gripper io ctrl mode:%d"%bytes_to_u16(ret[5:7]))
ret=arm.core.gripper_modbus_w16s(0x1817,u16_to_bytes(1),1)
print(ret)