如何通过TCP端口30000获取实时数据
本文以端口30000为例
1.介绍
我们提供 TCP 端口 30000 以实时获取机械臂数据,频率为 250HZ(使用 FT 传感器时为 200HZ)
下面简要描述如何使用 30000 端口进行数据报告。
2.Python示例
python
'''
Base on TCP port 30000, 250HZ.
Firmware version should be 2.1.101 or later.
Here is an example to get actual joint currents by TCP 30000 port, unit: Ampere.
'''
import socket
import struct
def bytes_to_fp32(bytes_data, is_big_endian=False):
return struct.unpack('>f' if is_big_endian else '<f', bytes_data)[0]
def bytes_to_fp32_list(bytes_data, n=0, is_big_endian=False):
ret = []
count = n if n > 0 else len(bytes_data) // 4
for i in range(count):
ret.append(bytes_to_fp32(bytes_data[i * 4: i * 4 + 4], is_big_endian))
return ret
def bytes_to_u32(data):
data_u32 = data[0] << 24 | data[1] << 16 | data[2] << 8 | data[3]
return data_u32
robot_ip = '192.168.1.77'
robot_port = 30000
# create socket connection
sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
sock.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1)
sock.setblocking(True)
sock.settimeout(1)
sock.connect((robot_ip, robot_port))
buffer = sock.recv(4)
print(buffer)
while len(buffer) < 4:
buffer += sock.recv(4 - len(buffer))
size = bytes_to_u32(buffer[:4])
cnt=0
while cnt<1000:
buffer += sock.recv(size - len(buffer))
if len(buffer) < size:
continue
cnt+=1
data = buffer[:size]
buffer = buffer[size:]
actual_joint_currents=bytes_to_fp32_list(data[200:228])
print("counter={},actual_joint_currents={}".format(cnt,actual_joint_currents))3.C++示例
cpp
#include <iostream>
#include <vector>
#include <array>
#include <cstring>
#include <arpa/inet.h>
#include <unistd.h>
float bytesToFloat(const std::array<uint8_t, 4>& bytes, bool isBigEndian = false) {
float value;
uint32_t intValue = isBigEndian ?
(bytes[0] << 24 | bytes[1] << 16 | bytes[2] << 8 | bytes[3]) :
(bytes[3] << 24 | bytes[2] << 16 | bytes[1] << 8 | bytes[0]);
std::memcpy(&value, &intValue, sizeof(float));
return value;
}
uint32_t bytesToUInt32(const std::array<uint8_t, 4>& bytes) {
return (bytes[0] << 24) | (bytes[1] << 16) | (bytes[2] << 8) | bytes[3];
}
std::vector<float> bytesToFloatList(const std::vector<uint8_t>& data, size_t start, size_t count, bool isBigEndian = false) {
std::vector<float> values;
for (size_t i = 0; i < count; ++i) {
std::array<uint8_t, 4> floatBytes = {data[start + i * 4], data[start + i * 4 + 1], data[start + i * 4 + 2], data[start + i * 4 + 3]};
values.push_back(bytesToFloat(floatBytes, isBigEndian));
}
return values;
}
int main() {
const char* robotIp = "192.168.1.77";
const int robotPort = 30000;
int sock = socket(AF_INET, SOCK_STREAM, 0);
if (sock < 0) {
std::cerr << "Failed to create socket" << std::endl;
return -1;
}
sockaddr_in serverAddr{};
serverAddr.sin_family = AF_INET;
serverAddr.sin_port = htons(robotPort);
inet_pton(AF_INET, robotIp, &serverAddr.sin_addr);
if (connect(sock, (struct sockaddr*)&serverAddr, sizeof(serverAddr)) < 0) {
std::cerr << "Connection failed" << std::endl;
close(sock);
return -1;
}
std::vector<uint8_t> buffer(4);
if (recv(sock, buffer.data(), 4, 0) < 4) {
std::cerr << "Failed to receive size data" << std::endl;
close(sock);
return -1;
}
uint32_t size = bytesToUInt32({buffer[0], buffer[1], buffer[2], buffer[3]});
buffer.resize(size);
int cnt = 0;
while (cnt < 1000) {
ssize_t received = recv(sock, buffer.data(), size, 0);
if (received < size) continue;
cnt++;
std::vector<float> actualJointCurrents = bytesToFloatList(buffer, 200, 7);
std::cout << "Counter=" << cnt << ", actual_joint_currents=[";
for (size_t i = 0; i < actualJointCurrents.size(); ++i) {
std::cout << actualJointCurrents[i] << (i < actualJointCurrents.size() - 1 ? ", " : "");
}
std::cout << "]" << std::endl;
}
close(sock);
return 0;
}4.解析数据
get_joint_angle_30000.py: 通过端口30000获取实际关节角度并保存为csv文件
read_csv.py: 读取数据并通过“matplolib”画图
- get_joint_angle_30000.py
python
import time
import math
import socket
import struct
import csv
import io
def bytes_to_fp32(bytes_data, is_big_endian=False):
return struct.unpack('>f' if is_big_endian else '<f', bytes_data)[0]
def bytes_to_fp32_list(bytes_data, n=0, is_big_endian=False):
ret = []
count = n if n > 0 else len(bytes_data) // 4
for i in range(count):
ret.append(bytes_to_fp32(bytes_data[i * 4: i * 4 + 4], is_big_endian))
return ret
def bytes_to_u8(data):
data_u8_0= int.from_bytes(data[:],byteorder='little')
return data_u8_0
def bytes_to_u16(data):
data_u16 = data[0] << 8 | data[1]
return data_u16
def bytes_to_u32(data):
data_u32 = data[0] << 24 | data[1] << 16 | data[2] << 8 | data[3]
return data_u32
def bytes_to_u64(data):
if len(data) != 8:
raise ValueError("Input data must be exactly 8 bytes long")
u64 = struct.unpack(">Q", data)[0]
return u64
robot_ip = '192.168.1.80'
robot_port = 30000
# socket connection
sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
sock.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1)
sock.setblocking(True)
sock.settimeout(1)
sock.connect((robot_ip, robot_port))
buffer = sock.recv(4)
while len(buffer) < 4:
buffer += sock.recv(4 - len(buffer))
size = bytes_to_u32(buffer[:4])
cnt=0
t0=time.time()
output = io.StringIO()
csv_writer = csv.writer(output)
while cnt < 15000:
buffer += sock.recv(size - len(buffer))
if len(buffer) < size:
continue
cnt += 1
data = buffer[:size]
buffer = buffer[size:]
# actual joint angles
actual_joints_in_rad = bytes_to_fp32_list(data[116:144])
print(actual_joints_in_rad)
actual_joints_in_deg = []
for i in actual_joints_in_rad:
j = math.degrees(i)
actual_joints_in_deg.append(j)
print('{},{}'.format(cnt, actual_joints_in_deg))
print(cnt)
csv_writer.writerow(actual_joints_in_deg)
with open('joint_pos.csv', 'a+', newline='') as f:
f.write(output.getvalue())
t1 = time.time()
dur = t1 - t0
print(dur)- read_csv.py
python
import csv
import pandas as pd
import matplotlib.pyplot as plt
data = pd.read_csv('joint_pos.csv')
print('test=', type(data))
# print('test================', data.iloc[:, 0])
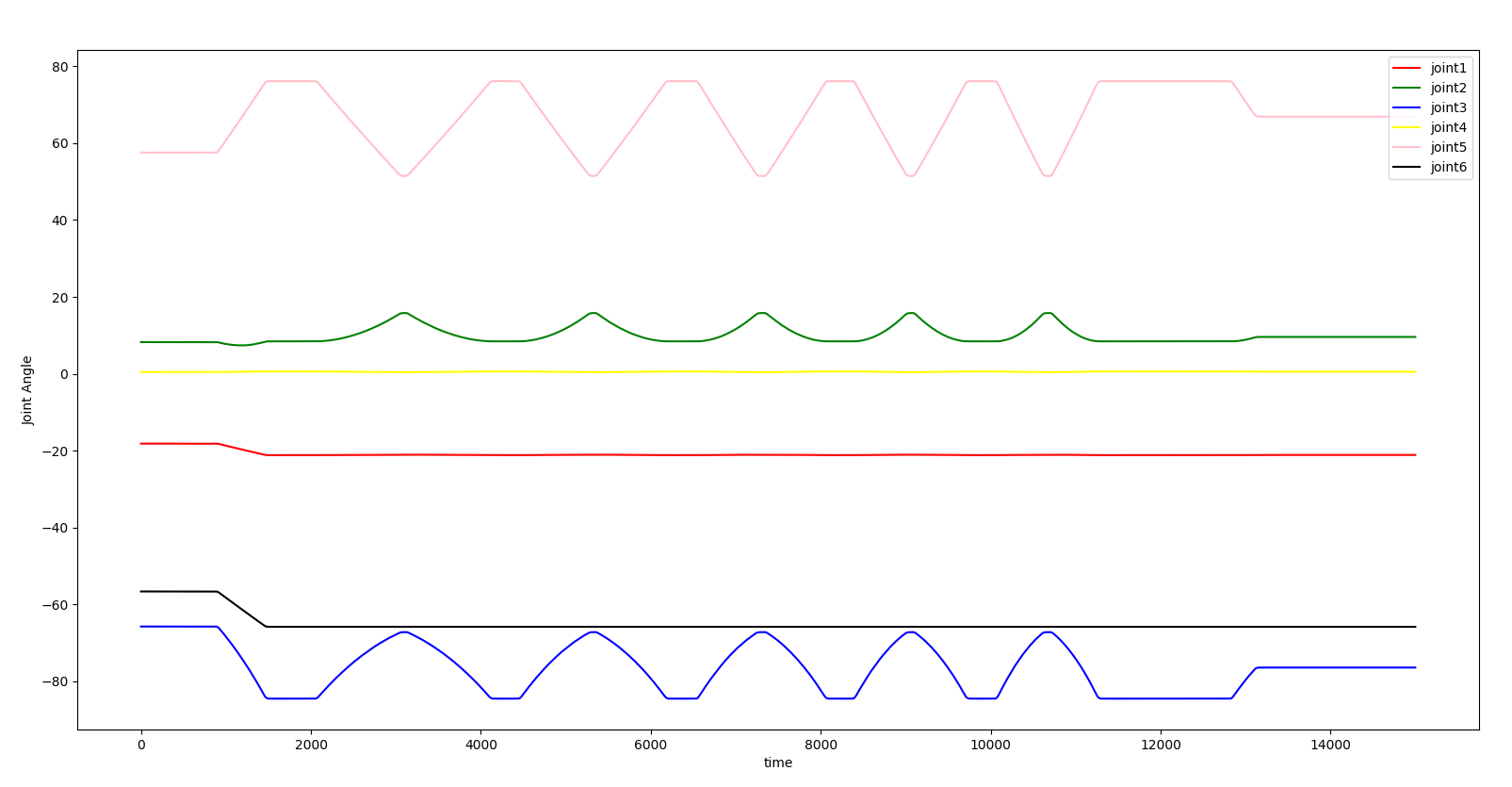
plt.plot(data.iloc[:, 0], label='joint1', color='red')
plt.plot(data.iloc[:, 1], label='joint2', color='green')
plt.plot(data.iloc[:, 2], label='joint3', color='blue')
plt.plot(data.iloc[:, 3], label='joint4', color='yellow')
plt.plot(data.iloc[:, 4], label='joint5', color='pink')
plt.plot(data.iloc[:, 5], label='joint6',color='black')
plt.xlabel('time')
plt.ylabel('Joint Angle')
plt.legend()
plt.show()例如:
结果如图: