xArm6
xarm6的运动学和动力学参数
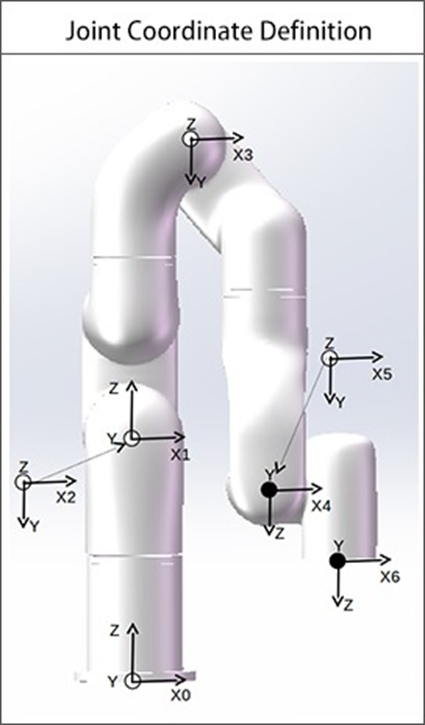
1.改进DH参数
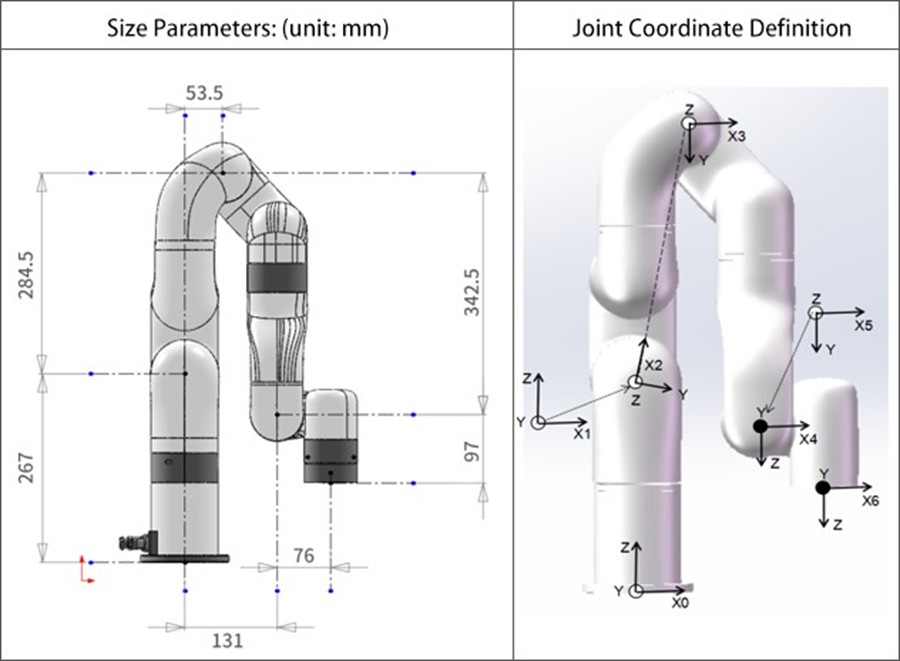
| Kinematics | theta(rad) | d(mm) | alpha(rad) | a(mm) | offset(rad) |
|---|---|---|---|---|---|
| Joint1 | 0 | 267 | 0 | 0 | 0 |
| Joint2 | 0 | 0 | -pi/2 | 0 | T2_offset |
| Joint3 | 0 | 0 | 0 | a2 | T3_offset |
| Joint4 | 0 | 342.5 | -pi/2 | 77.5 | 0 |
| Joint5 | 0 | 0 | pi/2 | 0 | 0 |
| Joint6 | 0 | 97 | -pi/2 | 76 | 0 |
2.标准DH参数
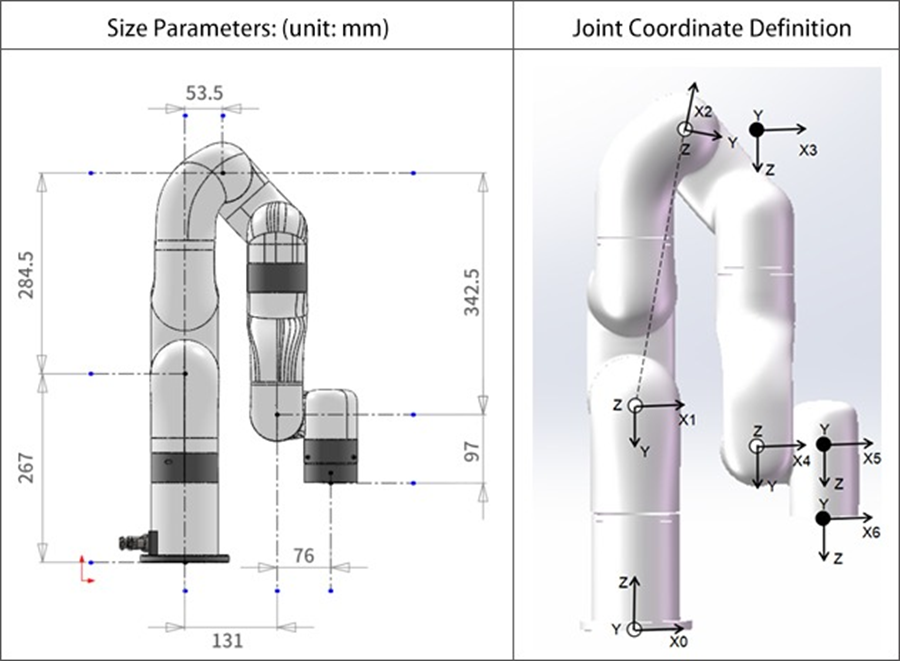
| Kinematics | theta(rad) | d(mm) | alpha(rad) | a(mm) | offset(rad) |
|---|---|---|---|---|---|
| Joint1 | 0 | 267 | -pi/2 | 0 | 0 |
| Joint2 | 0 | 0 | 0 | a2 | T2_offset |
| Joint3 | 0 | 0 | -pi/2 | 77.5 | T3_offset |
| Joint4 | 0 | 342.5 | pi/2 | 0 | 0 |
| Joint5 | 0 | 0 | -pi/2 | 76 | 0 |
| Joint6 | 0 | 97 | 0 | 0 | 0 |
‘Tx_offset’ ' 是从数学零位到图中所示的机械零位的偏移关节角度。.
a2 = sqrt(284.5^2+53.5^2) = 289.48866;
T2_offset = -atan(284.5/53.5) = -1.3849179 (-79.34995°);
T3_offset = -T2_offset = 1.3849179 (79.34995°);
3.质量参数
xArm6 - 模型1
| Dynamics | Mass(kg) | Center of Mass(mm) |
|---|---|---|
| Link1 | 2.177 | [0.15, 27.24, -13.75] |
| Link2 | 2.011 | [36.7, -220.9, 33.56] |
| Link3 | 1.725 | [69.77, 113.5, 11.6] |
| Link4 | 1.211 | [-0.2, 20.0, 26.0] |
| Link5 | 1.206 | [63.87, 29.3, 3.5] |
| Link6 | 0.17 | [0.0, -6.77, -10.98] |
xArm6 - 模型2
| Dynamics | Mass(kg) | Center of Mass(mm) |
|---|---|---|
| Link1 | 2.46 | [0.13, 30.1, -12.0] |
| Link2 | 2.21 | [38.2, -226.6, 34.7] |
| Link3 | 1.925 | [70.6, 117.2, 10.4] |
| Link4 | 1.36 | [0.18, 17.7, -23.0] |
| Link5 | 1.354 | [65.2, 31.8, 3.11] |
| Link6 | 0.17 | [0.0, -6.77, -10.98] |
xArm6 - 模型3
| Dynamics | Mass(kg) | Center of Mass(mm) |
|---|---|---|
| Link1 | 2.382 | [0.13, 29.4, -12.4] |
| Link2 | 2.267 | [38.8, -227.8, 34.96] |
| Link3 | 1.875 | [70.4, 116.3, 10.7] |
| Link4 | 1.319 | [-0.2, 18.0, -22.9] |
| Link5 | 1.34 | [65.1, 30.96, 3.15] |
| Link6 | 0.17 | [0.0, -6.77, -10.98] |
xArm6 - 模型4
| Dynamics | Mass(kg) | Center of Mass(mm) |
|---|---|---|
| Link1 | 2.53 | [-0.164, 35.94, -6.5] |
| Link2 | 2.242 | [40.84, -240.3, 32.54] |
| Link3 | 2.019 | [71.4, 126.8, 10.9] |
| Link4 | 1.361 | [0.185, 14.66, -21.97] |
| Link5 | 1.345 | [68.24, 33.42, 2.64] |
| Link6 | 0.173 | [0.8, -3.59, -13.26] |