如何在xArm末端使用Robotiq Gripper?
本文旨在介绍Robotiq 机械爪和xArm的连接方式,以及Robotiq 机械爪的用法的举例说明
1.硬件方面
- 机械爪:Robotiq 2F-85/ Robotiq 2F-140
- 机械臂: xArm5/ xarm6/ xArm7
2.线缆连接
1)pin针定义
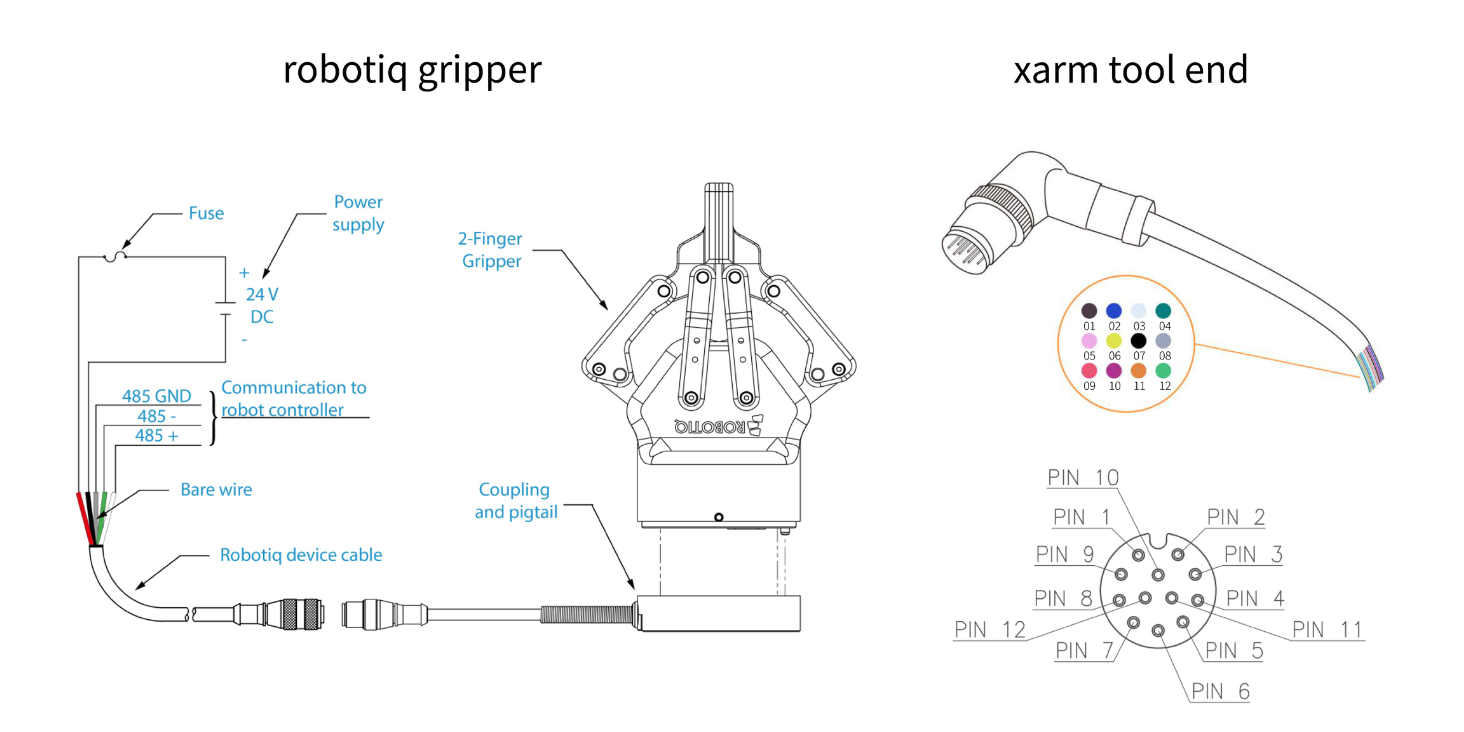
2)连接
| Robotiq 连接线 | Robotiq 连接线 | xArm工具末端 | xArm工具末端 |
|---|---|---|---|
| 颜色 | 信号 | 颜色 | Signal |
| 红色 | +24V DC | 棕色或者蓝色 | +24V DC |
| 黑色 | -24V DC | 白色 | GND |
| 白色 | 485-A | 粉色 | User 485-A |
| 绿色 | 485-B | 黄色 | User 485-B |
| 灰色 | 485 GND | 绿色 | GND |
3.参数设置
主要参数是波特率,TCP负载,防自碰撞模型
1)通过UFactory Studio设置参数
TCP负载和偏移:设置-运动参数-TCP设置
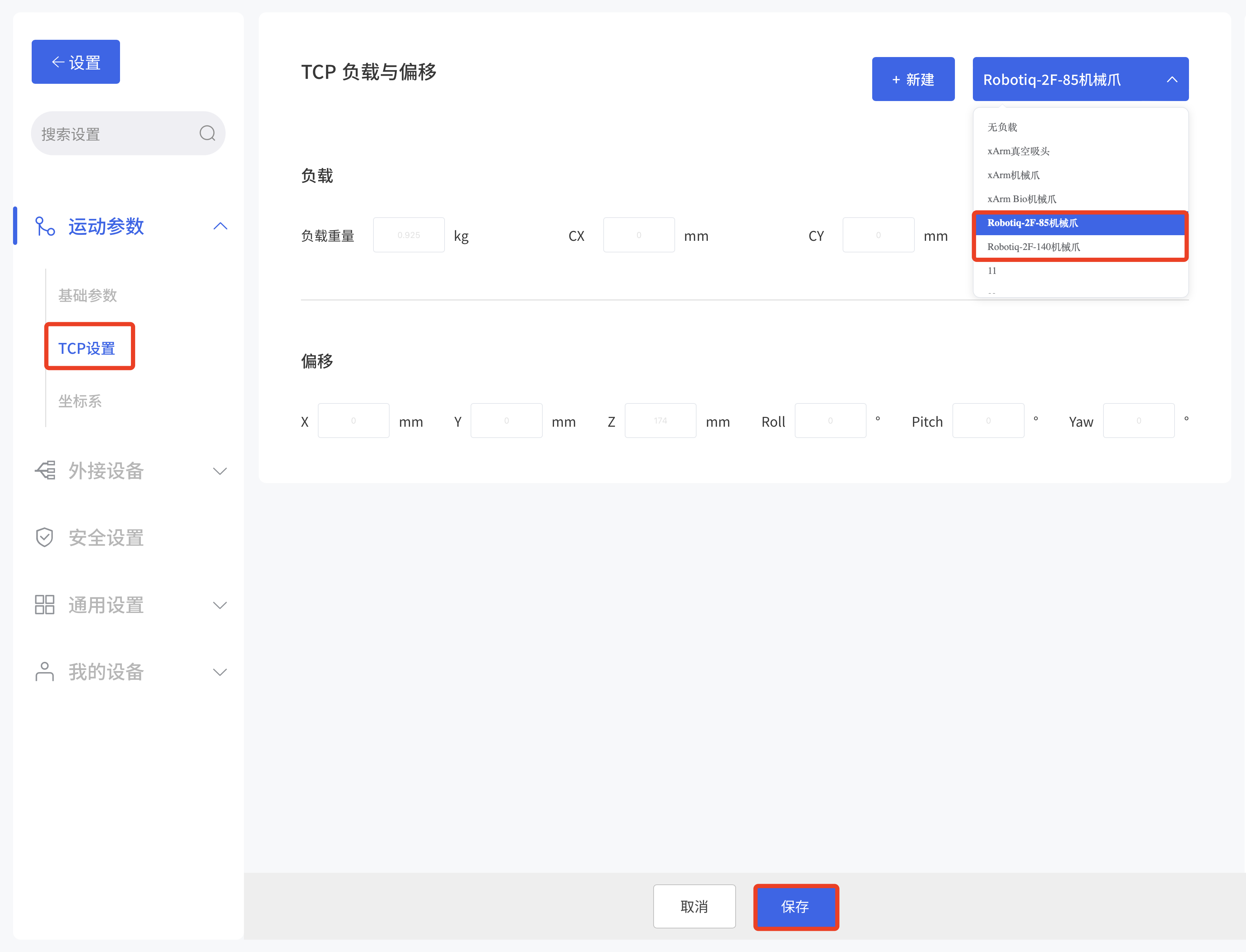
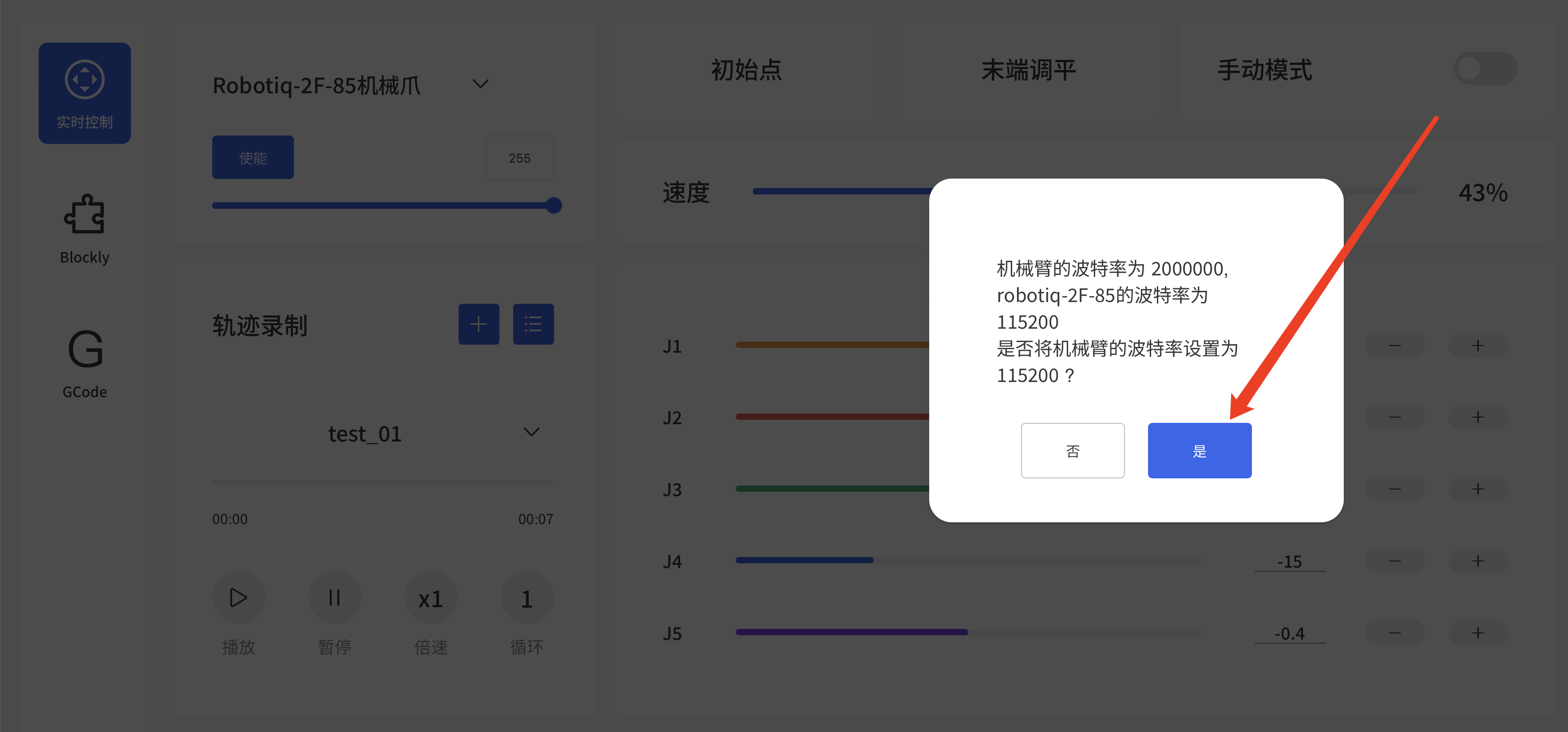
防自碰撞模型:设置-实时控制-末端执行器“,选择Robotiq 机械爪
请选择“是",这会把波特率设置为115200,默认波特率是2000000
2)通过python SDK设置参数
波特率:
python
//Code example
# Modify the baud rate to 115200, the default is 2000000.
arm.set_tgpio_modbus_baudrate(115200)TCP负载和偏移设置:
python
# Robotiq 2F/85 Gripper
arm.set_tcp_load(0.925, [0, 0, 58])
arm.set_tcp_offset([0, 0, 174, 0, 0, 0])
arm.save_conf()
# Robotiq 2F/140 Gripper
arm.set_tcp_load(1.025, [0, 0, 73])
arm.set_tcp_offset([0, 0, 244, 0, 0, 0])
arm.save_conf()防自碰撞模型
python
# Robotiq 2F/85 Gripper
arm.set_collision_tool_model(4)
# Robotiq 2F/140 Gripper
arm.set_collision_tool_model(5)4.控制方式
1)通过UFactory Studio控制

Ufactory Studio-Blockly
 2)通过python SDK控制
2)通过python SDK控制
python
arm.set_tgpio_modbus_baudrate(115200)
arm.robotiq_reset()
arm.robotiq_set_activate() #enable the robotiq gripper
arm.robotiq_close()
arm.robotiq_open()注意:
1-当使用SDK去控制爪子时,不需要发送CRC,我们会自动添加它
2-请注意,我们默认 Robotiq 机械手的唯一标识符(Slave ID) 为 ID=9。 如果您修改了机械手的 ID,UFactory Studio 或上述 SDK 将无法工作,您只能使用 getset_tgpio_modbus_data 对其进行控制。